1.電機NVH分析及優化流程
目前關注NVH更多還是汽車行業,可能是新能源汽車這一塊,作為整車廠的話,他可能關注的是動力總成,電機廠可能關注電機,但實際上很多電機廠現在慢慢的也做三合一的形式,所以動力總成的NVH問題他都關注。那么這里面聲源就比較復雜了,一個來自電機的電磁激勵,第二個來自齒輪的由于靜態傳遞誤差引起的這樣一個激勵。那么兩個激勵同時要放在總模型進行計算的話,這個可能帶來一些困難,另外整個轉速段的噪聲我們都要關注,因為可能踩油門時踩的轉速有高有低,那么這時導致力矩轉矩等工況不一樣,噪聲水平也不太一樣,在仿真時就要求作多轉速噪聲的仿真,同時針對動力總成的話,就要把兩種噪聲源同時考慮進來。那這時就要求噪聲的計算能不能采取一些比較高效的方法,也是目前比較流行的就是采用階次力的方式進行加載,其實階次來加載時,電機跟齒輪它們之間是不相關的,是獨立的。比如說可以單獨的總成只加電機噪聲,比如說電機的階次跟齒輪的階次是不相互影響的,那么這個是目前用的比較多的一種手段,是對激勵源的一個處理。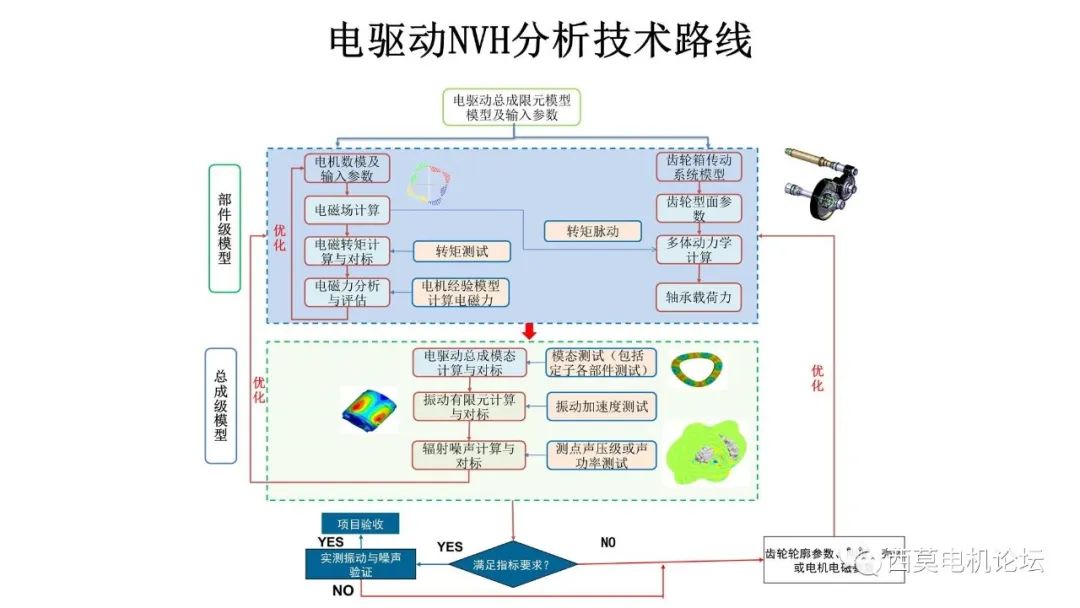
基于這個思想,比如說要仿電驅動總成的振動噪聲問題的話,那剛才講的激勵也來自于電磁或者來自于齒輪,那么分別要把電磁的激勵和齒輪的激勵給算出來。那么這個計算輸出的力載荷形式是一個階次力的形式,比如說像主流電機是八極的,那么它的一個電磁力主要是8的倍數,只需要考慮8的倍數就可以了;那齒輪的話比如說現在典型的21階,22階。那我們可以通過電機和齒輪的多轉速的計算或者我們叫加速過程的計算,然后進行一些數據處理,就可以把電磁力轉化成階次力,那么這個包含有電機電磁的階次力以及齒輪嚙合的階次力,把兩種力分別加到總成模型上。電機電磁力一般加在定子的齒面上,對于我們總成模型的話,它的齒輪力理論上可能是在齒輪的嚙合位置,但由于齒輪嚙合的位置不太方便加,因為力是傳遞的,我們可以把它簡化成加在軸承上面,力在齒輪嚙合位置產生,但是通過齒輪和軸傳遞到我們軸承的位置,所以我們通常可以簡化成在六個軸承點的位置加齒輪的一個嚙合激勵。那這里面就可以包含有電機的階次,比如8的倍數;也包含齒輪的階次比如21階、22階等等。那么這個總成里面我們進行一個總成的計算,可以輸出一個總的噪聲Colormap圖,包含有電機階次也包含齒輪階次的這樣一個噪聲Colormap圖。當我們不加載右邊這個齒輪階次的話,我們也可以完成這個計算,那么這時它算的這個噪聲就完全只是由電機電磁激勵所引起的噪聲。為什么可以這么實現呢?因為他們兩個階次力之間是相互獨立的,可以認為是不相關的,那可以合在一起加載,最終噪聲結果是一樣。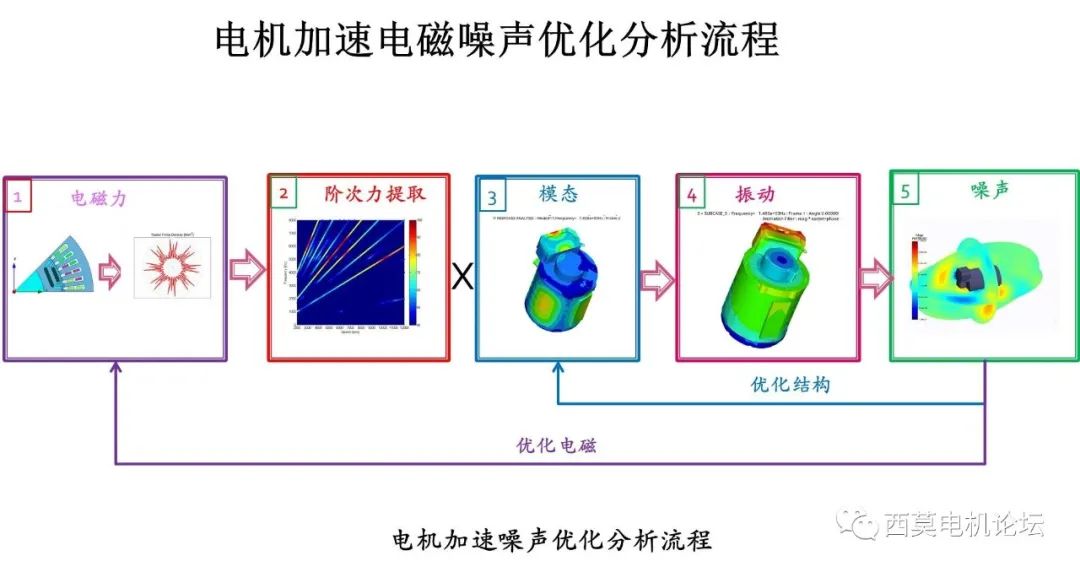
這里是針對這種加速電磁噪聲的一個計算分析流程圖。首先是從電磁做一個多轉速計算,把加速過程離散成各個穩態點,代替加速過程;然后比如說利用一些階次力計算軟件,把它的階次解出來,然后加到結構上算振動,接下來我們可以用這個噪聲軟件進行一個聲的計算。這只是實現的一個流程,那么后面對這個結果還需要進行一個優化分析,優化分析無非是從兩個方面,要么從他的激勵源,要么是從它的傳播途徑。激力源就跟電磁方案有關,或者是簡單來講就是與產生的電磁力大小有關,那么傳播途徑可以認為是一個放大因子跟結構是有關的,像這個典型的模態阻尼等等是有關的,通常我們優化無非是從這兩個方面來進行優化。這主要是正向研發型。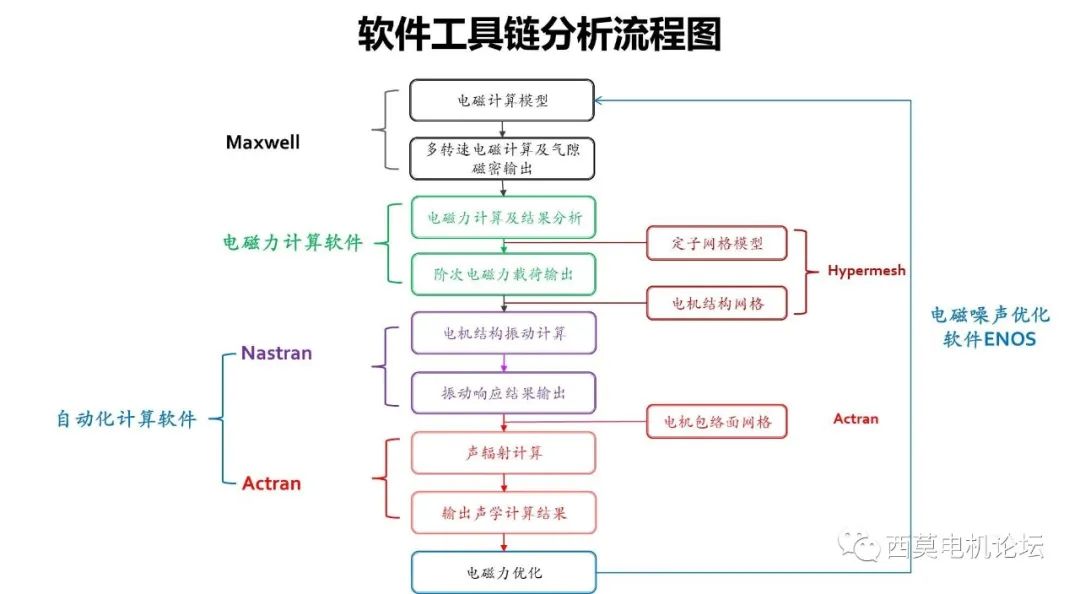
這是這個流程所使用的一些工具鏈,第一個電磁常用的比如說maxwell、jmag都可以,那么他算多轉速時是離散成各個轉速點,其實離散的各個轉速點的話,去設置各個轉速的話可能也比較麻煩繁瑣,比如說現在目前的這種車用電機可能達到2萬轉,那可能用1000轉作為它的一個間隔的話,可能這個分辨率還不太高,至少要500,比如說你算了2萬轉,那肯定至少就是20個轉速點,一個個去設置這個電磁模型的話,設置半天,然后計算的話要20個計算完以后,還要把這每一個轉速點的電磁結果導出來,如果說全部手工去完成的話,這個工作量還是挺大的。那么這個過程其實我們可以實現一個自動化,就是你只需要一個基礎模型,然后我們可以讓它自動的實現另外所有轉速的載荷的自動添加以及自動計算,磁密的自動導出。利用我們這套方法,其實只需要輸出電磁的磁密結果就行,就是在電磁模型里面的氣隙上面要畫一個圓弧線,把這個圓弧線上的磁密輸出來就可以了,這個算法原理非常簡單,就是麥克斯韋應力張量法,就是這個原理把它轉化成力密度,力密度再提分成力,然后再映射到比如說定子網格上面,我們這個軟件就可以完成電磁力的計算或者結果的后處理分析,然后得到階次力的一個colormap圖,colormap圖可以加到我們定子網格上面,網格可以通過hypermesh網格劃分。接下可以用結構軟件進行振動的一些計算,為了快速提高計算效率,一般我們是在計算過程最好先算它的模態。有了模態結果,我們再利用比如結構軟件那個模態疊加法來快速算它的振動響應,如果你不算模態也行,可以直接用它的直接法來直接綁定加在結構上算它的振動響應叫直接法,這可能算的效率會比較低一些,算的速度會比較慢。通常情況下一般還是用模態疊加法,電機模態頻率比較高,他這個模態結果的文件可能幾十G都有可能。那么這么大一個模型的話,你用直接法計算法效率會比較低。基于振動響應這個結果文件,可以導入actran然后自動來劃分它的聲學網格。有了聲網格就可以進行聲輻射的計算,然后輸出聲學結果,包括云圖曲線等。優化一般來說主要是三個方面的內容,就是優化目標,優化工況和優化變量。實際上我們針對這樣一個過程的話,做了一個自動化的開發, maxwell也是做了一個自動化的開發,只是目前還沒有把它集成這樣一個整體的進來,可以減少我們繁瑣的工作,提高我們的計算效率。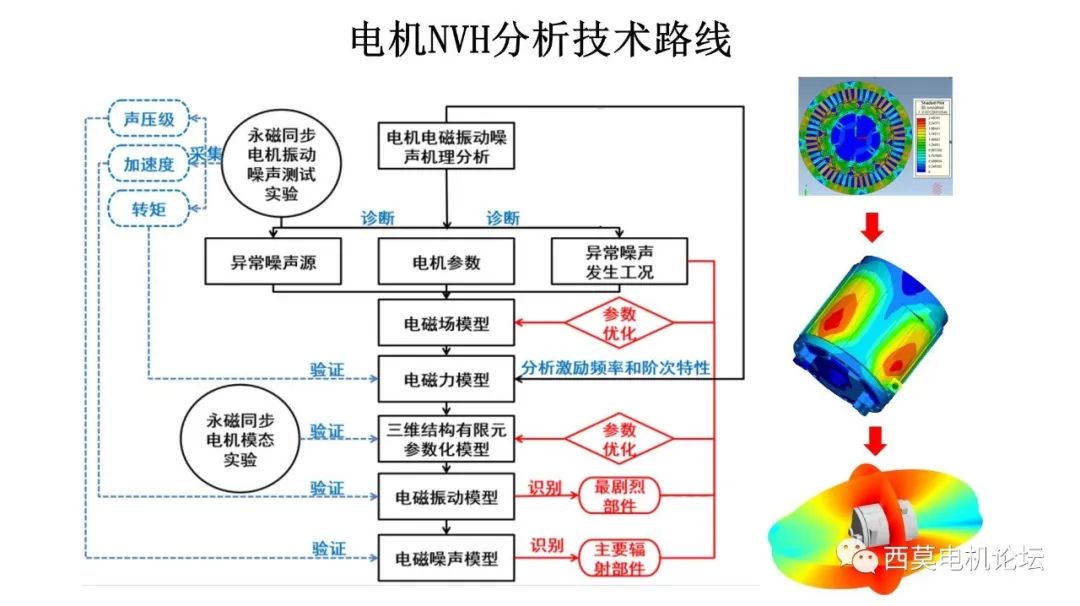
前面可以認為是正向研發型,也就是沒有任何測試結果來進行對標,其實我們在實際的問題中,很多是故障診斷型的。電機開發出來以后裝車或者有些沒有裝車直接在臺架上就可能測試或者通過主觀的感受感覺有一些明顯的異音,或者是異常的噪聲問題的話,那這時就要進行噪聲源的診斷分析,既然有樣機優先采用的手段是測試,把具體的噪聲源給診斷出來,比如說哪一個階次的噪聲出現問題,第二個要診斷哪一個轉速點或者是哪個頻段診斷出來,根據專業的NVH知識然后再加上電機理論可能大概能推算出來這個問題可能是什么原因。比如說無非就兩方面,要么是激勵的,是電磁還是轉矩脈動,還是說徑向電磁力引起的;第二如果是結構具體哪個板件,端蓋還是殼體共振,還是說總成的某個部件共振,或者如果是裝在整車的話,是不是電機跟汽車里面哪個部件產生了一個共振,所以把傳遞路徑或者是聲源給定位出來,再采取一些有效的措施嘗試的去進行一些改進。這是常見的不借助仿真的手段,實際上我們這種故障手段,通常也更多的需要借助一些仿真手段來幫助我們進行一些聲源的激勵分析,或者是優化分析,可能更加科學一些。仿真的話,因為有了樣機,就可以搭建一個高精度的仿真計算模型了,為什么高精度呢?我們剛才講它這個多物理場的仿真,實際上每個物理場都要通過仿真實驗對標,比如電磁場的計算一般我們可以對標平均轉矩,實際上你要嚴格對標的話,你要對標轉矩脈動或者反電動勢,但轉轉矩脈動一般很難去測準確,可能更多的對標一些反電動勢。結構我們有多種手段來進行校核,第一個是模態,一般來說我們是都需要做的,故障診斷型的話有條件的盡量多做模態試驗,包括零部件和總成的,然后還有振動,在臺架上測它的加速度,然后驗證振動計算模型的準確性;以及測聲壓來驗證聲學仿真模型的準確性。通過每一步來進行對標以后,確保我們這個仿真模型是可靠的、可信的。然后我們有了這樣一個高精度的仿真計算模型,現在在它的基礎上來進行優化,仿真的結果結合測試的結果來進行一個相互的驗證。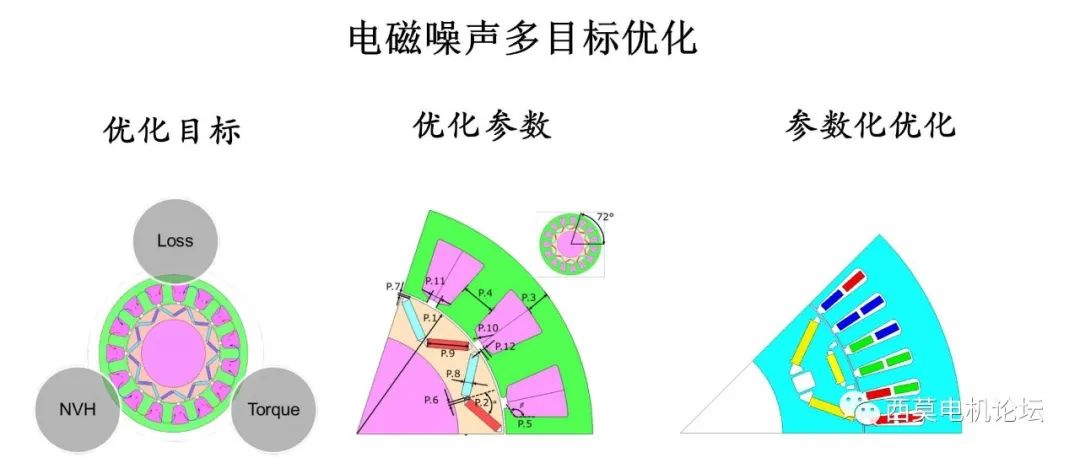
如果涉及到優化電磁的話,像磁鋼方案的設計千變萬化,角度或者是厚度稍微變一點,一字型、V型、雙V型等等,那么它這個參數就很多了,可能多達幾十個參數。如果我們對整個轉子進行參數化建模,對于雙V結構,可能有二三十個或者至少有一二十個變量,一二十個變量稍微變一點,它可能對電磁性能也好,NVH性能都會有變化。所以最好做目標的優化,我們優化的時候,不可能說對所有的轉速點都要去進行優化,這個工作量也太大了。一般來說,前期要把這個具體的工況給定位出來,定位出來哪個轉速點出了問題,定位出來我們再優化,也都是在一個很小范圍內變化,那你如果大幅變化的話,可能大幅影響我們的電磁性能,有可能就滿足不了基本的電磁性能的要求。這個可以通過優化的軟件來自動尋優去實現。如果去找的話,可能大家經驗比較豐富,也可以去找出一個相對比較優的,但可能不一定是最優的。在這一部分的話,目前大家可能更多的還是借助這種優化算法來實現更加方便。2 試驗分析及問題診斷
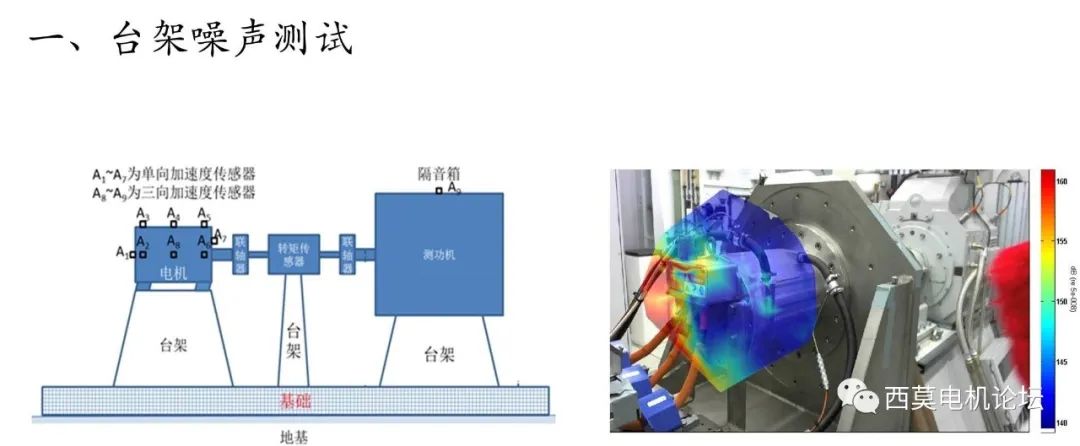
以一個案例具體講一下分析流程,當然這里面可能不一定用的是真實案例的圖片,只是介紹這個方法。那比如說類似這種故障診斷型的,前期要做這種相關的實驗,最典型的多轉速噪聲問題的話,最基本的一個實驗叫做加速噪聲測試,但對于單轉速應用的工業電機等,要進行噪聲分析的話,也建議做這種加速噪聲測試。因為通過加速噪聲測試可以得到一些很豐富的信息,尤其這種模態,共振,共振的轉速點以及共振的模態點頻率點,可以通過加速噪聲測試給測出來。加速噪聲測試一般需要加載,需要測功機,要加一個聯軸器,如果需要轉矩再加一個轉矩傳感器。首先第一個基本的要求是測噪聲的,沒條件可以做近場的測試,比如十厘米的位置,有條件就在消音室。然后同步在電機殼體上或者一些關鍵點的位置布置加速度傳感器,同步要把噪聲和振動同時給測出來,考慮控制對噪聲的影響要同步測試它的電流信號,轉矩主要可以驗證一些仿真模型,有些測功機其實比電機本體噪聲可能還要大,所以要進行一個隔聲處理,如果說沒有條件,可能做一些簡易的隔音箱,有些客戶也是這么來做的,但是要注意密封要處理的比較嚴實,如果泄漏比較大的話噪聲可能還是會通過泄漏孔傳出來。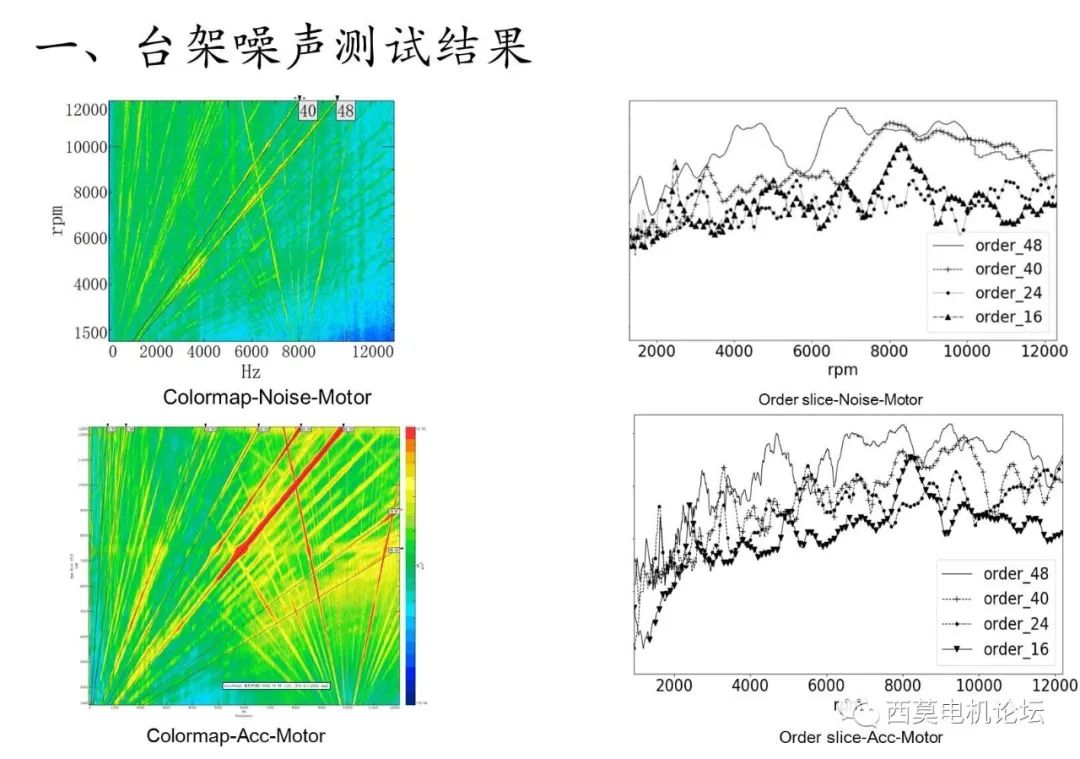
做加速噪聲測試就可以得到這個Colormap圖,那么就可以很明顯得到噪聲的階次,比如像我們這個電機的階次很顯然它主要是48階,40階也有一點,但40階不是特別明顯,下面是振動,要想看他詳細的噪聲數據的話,可以把它做一個階次切片,一般在設置軟件里可以很方便做這種切片的提取,比如48階,40階,八極電機電磁噪聲主要階次就是八的倍數,所以你只要提八的倍數就可以了,機械噪聲的話那就不一定了,我們這里只討論電磁階次噪聲,那你提取8的倍數,很顯然48階的噪聲明顯大于其他階次的噪聲。比如說把48階噪聲降下來的話,可能這個噪聲問題就基本上降下來,這里面對應的這個峰值轉速,4300轉、六千五百轉左右,還有9800轉都是主要問題。振動也是類似的,所以它具有很強的相關性。那么對問題階次問題轉速點都分析出來了,如果是通過測試的手段,只要根據NVH的一些經驗再加上一些理論知識,做一些分析可能大概能推算出來。但傳遞途徑上,通過這個數據的話,就很難去診斷出來,或者確定出來具體是哪個部位,要想確定部位的話,可能就要大量布置更多的測試點,對應的這個麥克風、傳感器,然后通過這些數據分析,可能會推測出大概的這個部位是哪里,但這種推測可能不是那么精確。所以有時候我們也通過仿真來驗證,或者通過仿真來給出具體的優化方向。那么接下來我們針對這樣一個故障診斷問題的話,我們一般是采用仿測試仿真相結合的方法,那么剛才是通過測試,大概能把這些問題給定位出來。(未完待續)相關介紹:
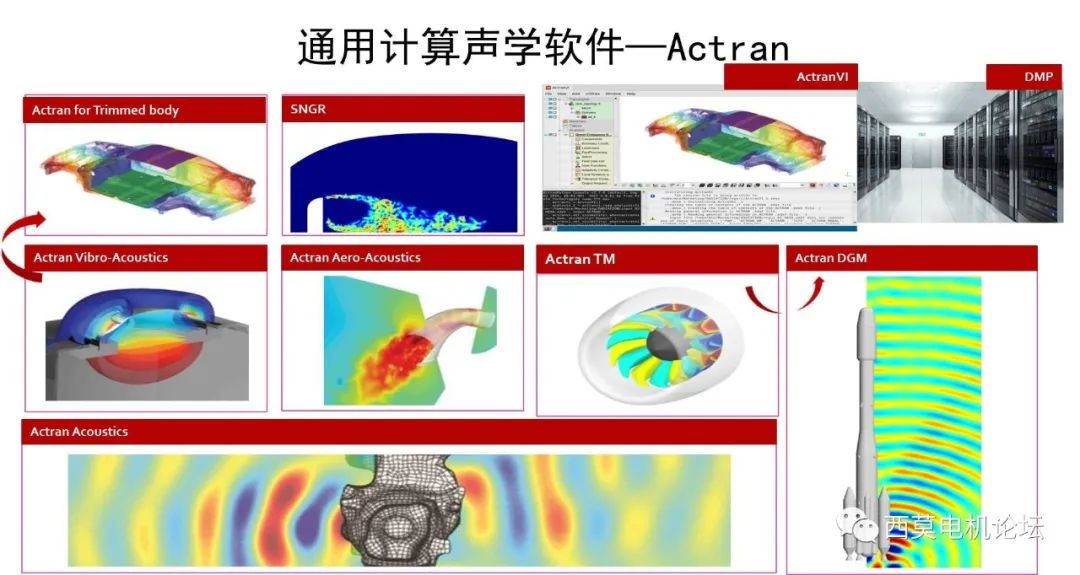
這里是我們代理的一款聲學軟件Actran,我們公司主要做的一些聲學項目,最后的這一部分聲輻射這一塊主要是用Actran來完成的,其實主要是用它的一個基礎模塊就可以了,一個聲輻射的模塊。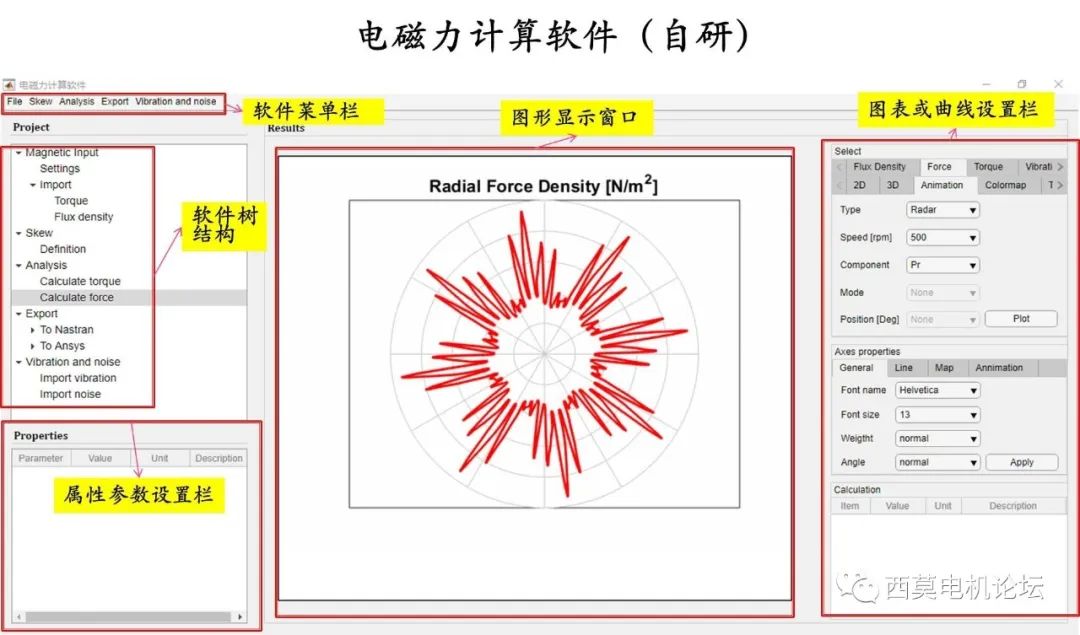
這是我們公司自研的一款電磁力計算軟件,我們開發這個軟件的背景主要是基于三個方面。第一目前的一些商業電磁軟件對電磁力的后處理功能是比較薄弱的,那我們現在是對他一個補充,我們可以專門針對電磁力做豐富的后處理,比如說一維傅里葉分解二維傅里葉分解或者是colormap圖等等;第二我們可以考慮斜極斜槽對電磁力的影響,目前有些商業軟件可以考慮斜極斜槽對電磁性能的影響,但是他沒有辦法考慮斜極斜槽對電磁力的影響;第三我們可以實現把電磁軟件的力加載到我們結構軟件上,進行一個自動化的加載,不光是這種頻譜力,還可以實現這種階次力的計算和加載,可以打通我們電磁軟件和結構軟件的一個接口,方便我們進行電磁振動的計算。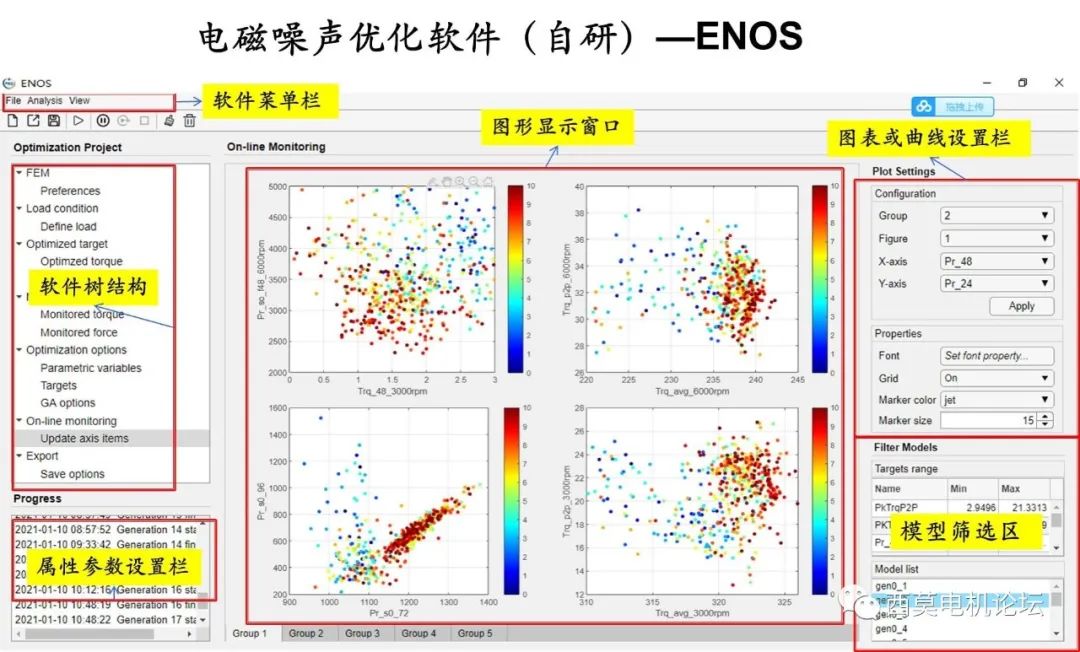
這是我們公司自研的一款電磁噪聲優化軟件,主要針對電磁力或者電磁方案的自動尋優。比如主要的一個優化目標是48階電磁力,這里面可通過我們軟件來進行設置;第二個可以通過優化軟件進行設置轉速;第三個優化變量,可以針對整個轉子參數化建模也可以針對某些轉子、某些參數,比如說可以只帶一些個別的參數,在轉子外圓上開槽或者是在定子開槽等等進行一個局部的參數化建模;那么最后可以通過這個優化軟件驅動電磁軟件進行優化計算,最終輸出所需要的優化模型,然后再做一個模型篩選,找出所需要的一個最終的優化模型出來。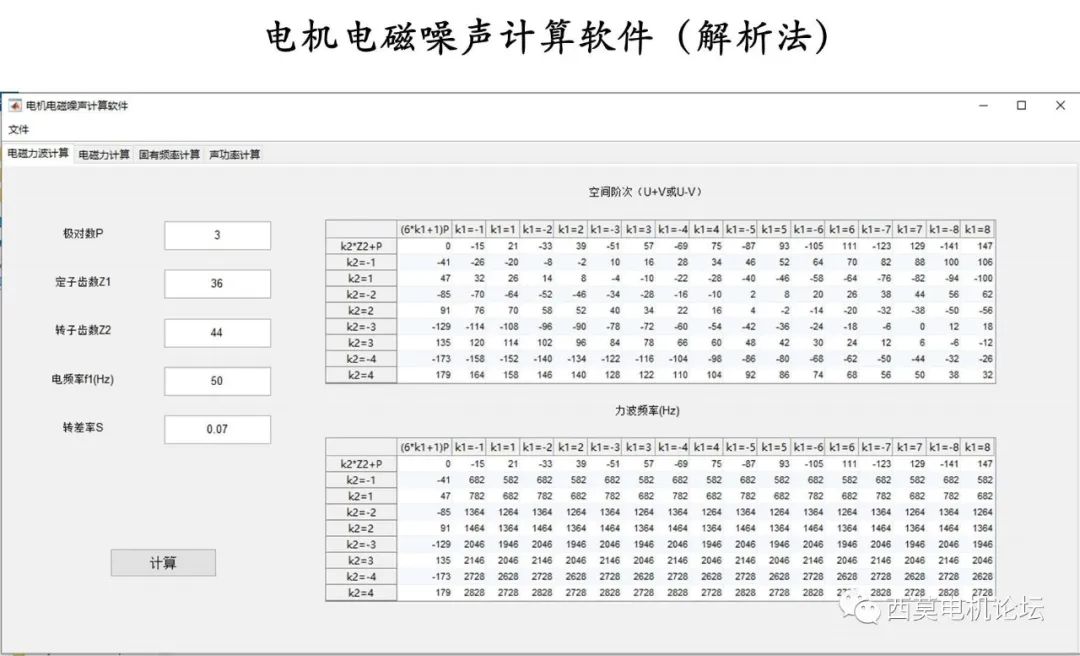
這是我們公司開發的一款基于解析法來快速計算電機電磁噪聲的一個軟件。主要是趨勢計算,精度可能不是太精確,但可以在前期進行快速方案評估。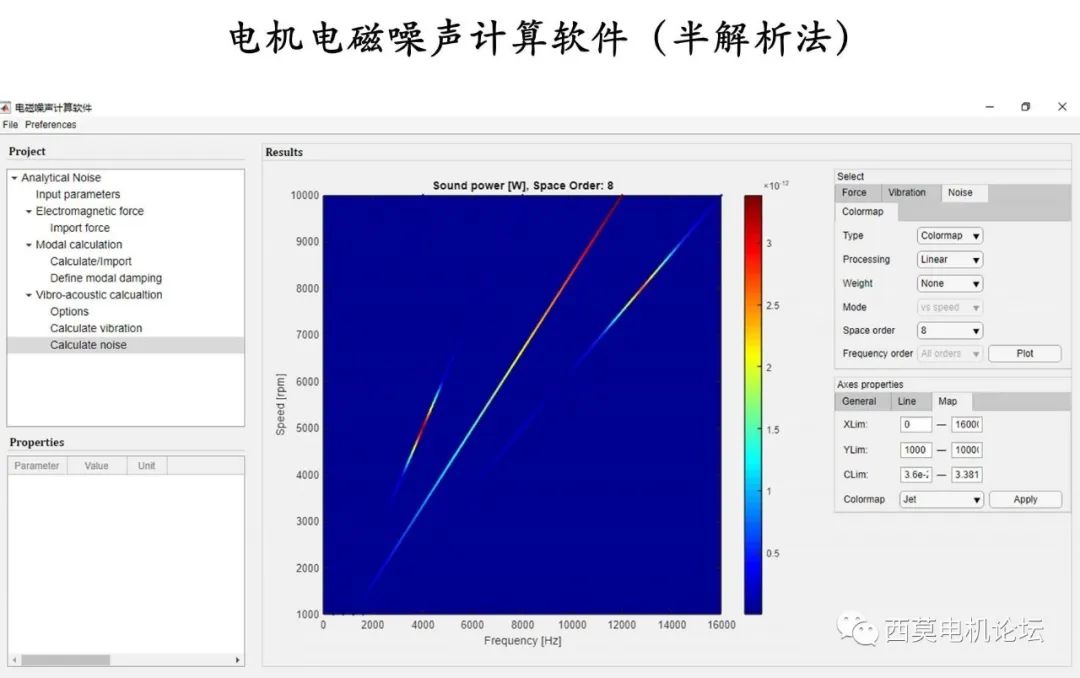
那想更精確一點分析,可以采用半解析法,這是我們公司開發的一款基于半解析法來快速計算電機電磁噪聲的一個軟件。所謂半解析法,就是我們前面的電磁部分是通過二維的有限元計算輸出氣隙磁密的結果,然后接下來用我們的這個軟件把氣隙磁密讀進來,進行一個快速電磁力的計算,后面的像模態振動噪聲等等這部分的計算,我們是直接用經驗公式就可以來完成了,那么這個可以參考相關的一些比如說我們主要是參考這個多相電機里面的經驗公式來完成振動噪聲的快速求解計算,它這個就是計算效率很快,可以快速出這樣一個振動噪聲的那個圖。
這是我們開發的一款振動噪聲自動化計算軟件,其實我們后臺主要是集成的Nastran和Actran來分別完成振動的計算和噪聲的計算,只是我們把這兩個軟件集中在我們這個界面里做一些簡單的選擇、填空,然后就可以快速的完成這種模態、頻響、還有噪聲的自動化模型設置求解、后處理等等,最主要的目的就是可以提高我們的工作效率,減少我們的重復勞動。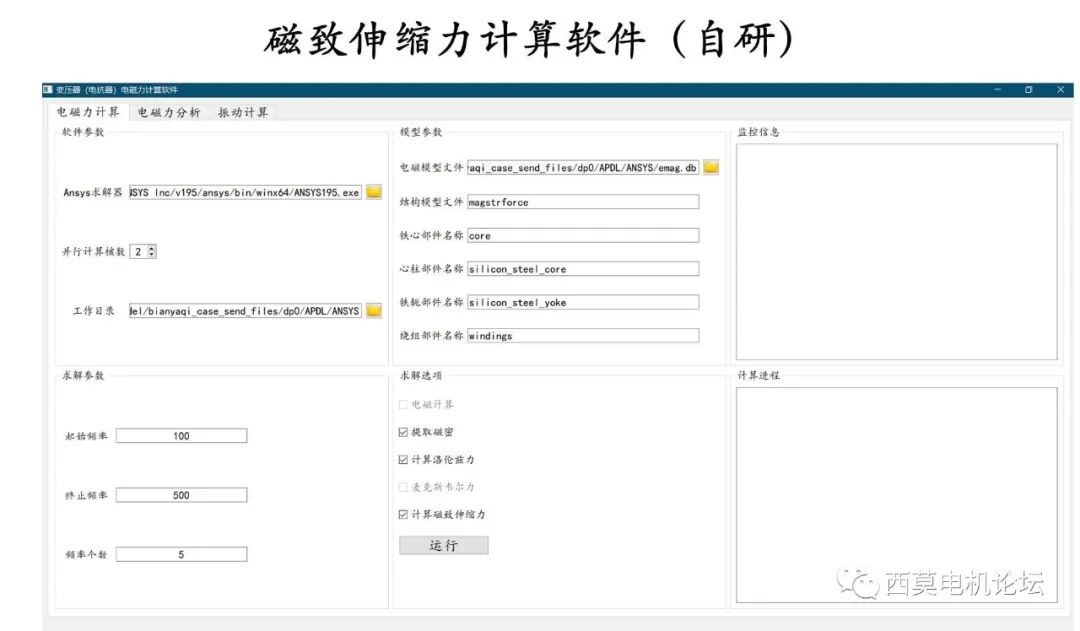
這是磁致伸縮力計算軟件,主要用在大電機上,大電機振動噪聲源就不是麥克斯韋力了,小電機可能主要還是麥克斯韋力引起的振動噪聲問題。但是針對大電機或者針對變壓器,它主要激勵不再是麥克斯韋力,它可能是這樣一個磁滯伸縮力,并且振動噪聲可能它占比也會更大。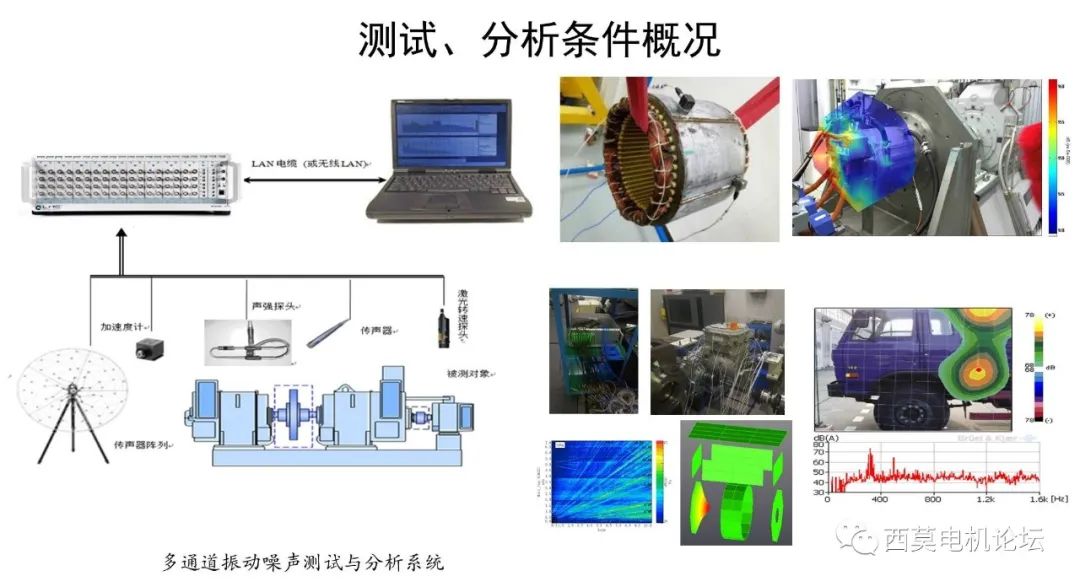
很多情況下是測試仿真不分家,仿真服務是我們的主要服務,同時我們也提供相關的一些測試。比如說我們在做一些項目過程中,尤其這種故障診斷性的項目,肯定前期要做一些相關的NVH的測試,那么我們這些相關的一些測試設備,像典型的模態測試可以幫助我們校準模型的,或者做一些這種模態的確定或者模態的分析,還有些在臺架上做一些加速噪聲的測試或者加速振動的測試,這個一般我們在多轉速問題的話,這個加速噪聲通常要做的,幫助我們進行一個具體噪聲的定位,還有時候做一些工作變形的測試,或者是聲源定位的測試等等。
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。
紅外遙控器相關文章:紅外遙控器原理
萬能遙控器相關文章:萬能遙控器代碼
手機電池相關文章:手機電池修復
pa相關文章:pa是什么
波段開關相關文章:波段開關原理
上拉電阻相關文章:上拉電阻原理
溫濕度控制器相關文章:溫濕度控制器原理

