基于ARM的電腦鼠控制系統研究

4 實驗驗證及分析
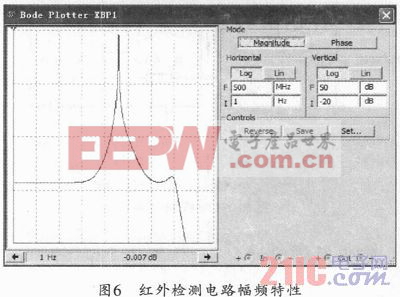
(1)紅外傳感器測距系統中使用基于選頻網絡的放大設計,由于電阻電容選用國標,無法使中心頻率恰好落在38kHz,雙T選頻網絡中心頻率f0=1/2πRC,選擇R/C=10k/430pF,f0=37kHz,用multisim仿真出的幅頻特性如圖6所示,搭建硬件實驗電路,中心頻率并未落在37kHz而是30kHz,減小RC值多次試驗,當R/C=9.1k/430pF,中心頻率落在38kHz。本文引用地址:http://cqxgywz.com/article/149386.htm
(2)迷宮墻壁由空心的白色塑料做成,有很大一部分紅外光發生透射,加之日光影響,因此如法給發射管套用黑色外管,減少外界干擾;由ARM微處理器產生PWM信號送人紅外發射管,接收管接收經過調制的紅外信號;用三極管實現電平轉換,調節電位器增加發射功率,使信號調整放大到A/D轉換的最佳量程范圍內,獲得期望的處理精度。通過實驗多次測量,得到一組紅外測量距離與輸出電壓的數據,以障礙物距離S為橫坐標,選頻放大后的電壓值U為縱坐標,用matlab繪制曲線,電壓值與距離關系式為U=0.1195+4.5962*S-1,如圖7所示。
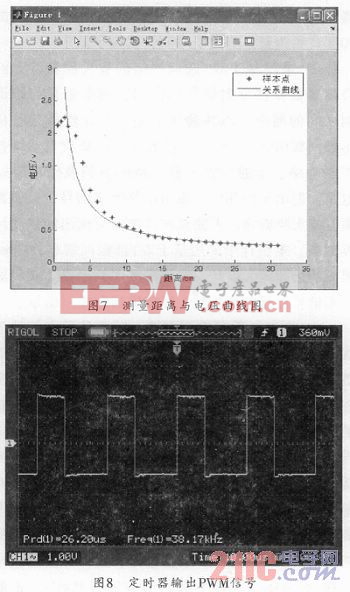
(4)利用STM32定時器功能,通過軟件編程調制出需要的PWM信號,以此控制電機、發射紅外,圖8是Timer4的CH1通道輸出頻率為38kHz,占空比為30%的PWM信號。
5 結束語
本文設計了基于STM32F103RCT6的電腦鼠控制系統,在matlab、muhisim仿真基礎上,確定了選頻網絡的RC參數,并通過實驗得到距離與電壓值的關系圖,體現了對稱RC雙T網絡良好的選頻特性;電機及驅動模塊選用效率高、響應快的空心杯直流電機。經試驗驗證,該設計方案可以滿足系統要求。










評論