基于DSP的覆冰機器人控制系統研究

定義第一個節點的死亡時間為無線傳感器網絡的網絡壽命,用工作輪數表示網絡的工作時間。如果剩余節點過少,那么整個網絡的存在就毫無意義。仿真中為了更好地對比仿真結果,仿真曲線只選取剩余節點數大于50的情況。仿真結果如圖5所示。
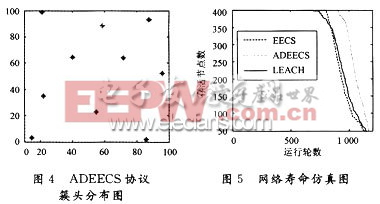
由圖5可以看出,在成簇階段,ADEECS協議綜合考慮了簇頭剩余能量、簇頭與基站的距離以及簇成員節點與簇頭的距離。這種通信代價計算方式很好地提高了網絡性能,有效地延長了網絡生命周期,達到了協議目的。
5結語
通過對無線傳感器網絡中典型分簇路由協議、LEACH協議和EECS協議進行的研究和分析,提出了一種改進的分簇方案ADEECS。利用延遲發送競爭消息的方法和新的通信代價公式很好地解決了EECS協議存在的問題,實現了簇頭的均勻分布,有效地延長了網絡壽命。











評論