基于ARM的氣門電鐓成型電流控制

圖3為過零檢測原理圖。用光電隔離器TIP521對電壓過零檢測。當電壓沒有過零時,TIP521中有一路導通,則DTDS=0;當電壓過零時,則DTDS=1。DT、DS經一與非門接到S3C44B0X的PG0口,則當電壓過零時,觸發中斷EXINT0。
電鐓機鐓粗過程中鐓粗壓力、鐓粗缸和砧子缸的速度以及加熱電流等幾個參數對氣門成型溫度、成型形狀及質量等有直接影響,而且各參數需優化配合。加熱電流直接影響加熱溫度,但鐓粗速度也會影響加熱溫度,而鐓粗速度又受加熱溫度和鐓粗壓力的影響。這些參數之間互相影響,且這幾個參數的變化關系是非線性的,用常規的PID控制器,難達到較好的效果。
FuPID是將模糊控制與經典PID控制相結合形成的新型控制器,適用于非線性嚴重、工況變化大的過程,能夠有效提高控制品質。FuPID使用方便,參數調整可以參照PID控制器的調節經驗進行。FuPID還可以根據實際對象的特點,實現局部控制規則的調整,從而實現控制參數的局部優化,實現更好的調節效果。
4.1 模糊控制控制策略
模糊控制器[4][5]是一種語言型控制器,故也稱為模糊語言控制器,其核心就是利用模糊集合理論,把人的控制策略的自然語言轉化為計算機能夠接受的算法語言所描述的控制算法,這種方法不僅能實現控制,而且能模擬人的思維方式對一些無法構造數學模型的被控對象進行有效的控制。
模糊控制的主要步驟是:
①將真實的確定量輸入轉換成一個模糊矢量。
②轉換的模糊矢量由基于專家或手動操作熟練人員長期經驗而推理形成的一種語言表示形式-模糊規則,來計算出模糊的控制量。
③由模糊控制量計算處理得到精確的控制量并輸出到執行機構上。
為了提高控制性能,采用二維模糊控制器。FUPID控制器結構框圖如4所示: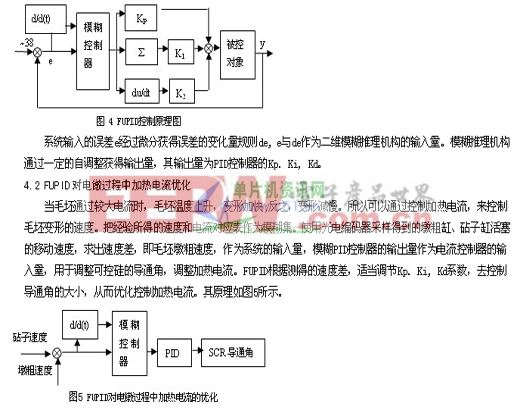
5、可控硅調功控制的軟件實現
5.1 電壓過零點檢測
電壓過零檢測端口接到ARM端口G的PG0端口,則當電壓過零時觸發ARM的外部中斷EXINT0。
中斷初始化為:
Void init_Ext0(void)
{ rINTMOD=0x0;//設置為IRQ中斷
rINTCON= 0x1;//允許IRQ中斷
……}
Void Eint0Isr(void) //中斷服務程序
{
OS_ENTER_CRITICAL();//關中斷
rI_ISPC=BIT_EINT0; //清掛起位
rEXTINTPND=0xf;//清EXTINTPND
OS_EXIT_CRITICAL();//開中斷
OSSemPost(Sem);
}
5.2 觸發脈沖的實現
檢測到電壓過零后,啟動定時器來對導通角觸發位置進行計時,當計時時間到時,由PE5口發出一觸發脈沖。在系統中采用定時器0來定時。時鐘初始化程序為:
Void timer_Int(void)
{
rINTMOD=0x0;
rINTCON=0x1;//使能中斷
}

基爾霍夫電流相關文章:基爾霍夫電流定律








評論