CAN總線網絡的實時性研究和改進

4 仿真實驗及結果分析
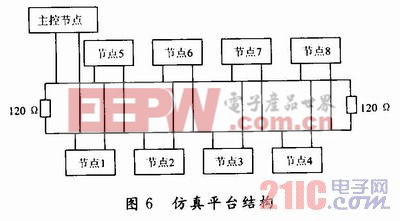
為了驗證動態優先級算法和TTCAN算法在提高CAN總線實時性方面的性能,設計了如圖6所示的實驗平臺。分析網絡延時時間,并進行兩種算法的性能分析。仿真系統設計8個節點,每個節點由AT89S52單片機、SJA1000和PCA82C250組成,通過向每個節點發送消息型和時間型消息,在改變網絡負載率的情況下,分別在標準CAN,TTCAN、動態優先級算法3種調度算法下進行實驗,比較節點的延遲時間。本文引用地址:http://cqxgywz.com/article/155170.htm
向各個節點發送消息型和事件型信息幀各200幀,得到各幀的延遲時間,以其中一個節點為例,統計結果如表2所示。
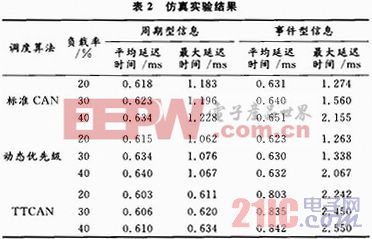
通過實驗數據可以看出,隨著負載率的升高,動態優先級下周期型消息的延時時間也隨之增加,TTCAN下周期型消息的延遲時間很穩定;隨著負載率的升高,動態優先級下事件型消息的延遲時間增加較小,TTCAN下事件型消息的延遲時間明顯增加。動態優先級調度算法相對于標準CAN調度算法,在網絡實時性方面有了一定的提高,隨著網絡負載率的增加,低優先級節點獲得總線使用權的幾率增加。TTCAN調度算法能明顯降低周期型信息的延遲時間。
5 結語
本文通過分析CAN協議、分析CAN總裁機制,提出了動態優先級調度算法和TTCAN調度算法。通過搭建仿真平臺,比較數據幀在標準CAN、動態優先級調度算法、TTCAN調度算法3種算法下的傳輸延遲時間得出如下結論:相同負載率下,TTCAN調度算法下周期型消息的傳輸延遲時間要比動態優先級調度算法下周期型消息的延遲時間小;相同負載率下,動態優先級調度算法下事件型消息的傳輸延遲時間要比TTCAN調度算法下事件型消息的傳輸延遲時間小。TTCAN調度算法適合于確定性硬實時系統的消息調度;動態優先級算法可以靈活適應系統的變化,提高CAN網絡實時性的要求,減小優先級較低站點的數據傳輸延遲。








評論