嵌入式多路信號數據采集系統

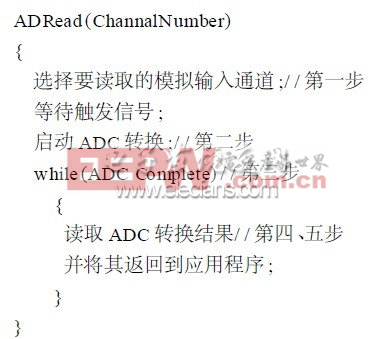
在實時內核下,接口程序讀取A/D采樣數據的方法通常有三種:程序延時法、ADC轉換完畢時產生中斷法和程序循環等待的方法。其中循環等待的方法CPU開銷小,不需要中斷服務,比較適合嵌入式系統中采用。
循環等待A/D讀取數據的偽代碼如下:
之間通過串口相連,采集數據先通過開發板串口UART0發送到無線數據終端AYG285C的緩沖區,然后緩沖區將數據打成一個個數據包,通過GPRS網絡發送到遠程數據處理中心。因此,在μC/OS2Ⅱ下LPC2134的UART底層接口驅動顯得尤為重要。
UART0初始化函數片斷如下:
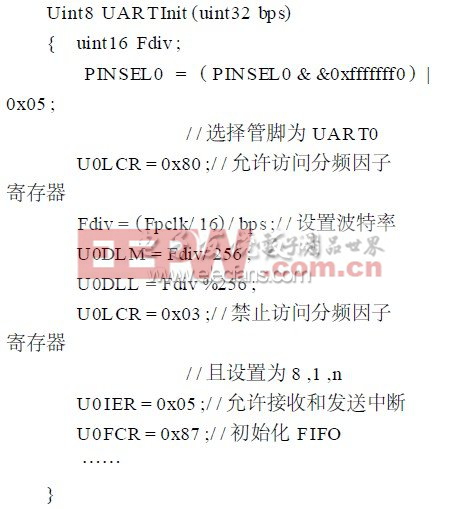
在本系統中,串口通信采用8位數據位,1位停止位,奇校驗,無流控制。在實際使用中為接收數據穩定波特率設置為9600bps效果較好。在測試系統中,測量到的數據范圍為10-6~101,有效數字為4位,所以在發送數據時采用每幀數據由3個字節組成,第1個字節為數據指數部分,高四位為0,低四位中的第四位表示指數符號,0表示正數,1表示負數;其余三位表示指數的數值部分。
后續兩個字節為數據底數部分,采用壓縮的BCD碼編碼方式,高位在前,低位在后,即一個字節表示兩位十進制數,則兩個字節表示四位十進制數。
LPC2134的UART0使用中斷方式進行通信,這樣不會占用CPU很多時間,效率比較高。當中斷服務處理子程序接收到一次中斷,它僅能知道UART0產生了中斷,還需要查詢中斷標志寄存器U0IIR,依據不同中斷源類型進行不同處理。在處理完當前的中斷源類型之后,不能立即退出服務,而應當繼續判斷U0IIR寄存器最低位是否為0。
如果為0,則表示還有尚未處理的中斷,應該繼續根據U0IIR[3∶0]判斷中斷源類型,進行處理,直到U0IIR的最低位為1,最后發送中斷結束命令結束中斷服務處理程序。
SD卡讀寫軟件移植到ARM7微處理器LPC2134上的結構圖如圖3所示。其中硬件抽象層是讀寫SD卡的硬件條件配置,是與硬件相關的函數;命令層包含SD卡的相關命令以及卡與主機之間數據流的控制,這一層與實時操作系統μC/OS2Ⅱ相關,與硬件無關;應用層是向應用程序提供卡的API函數,這一層由實時操作系統μC/OS2Ⅱ控制。
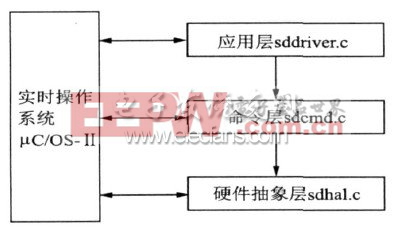
圖3 SD卡讀寫軟件移植結構圖
3.3 應用程序實現
系統初始化完成后,創建各個任務,進入多任務調度處理。應用程序框架流程如圖4所示。
本系統的主要任務是完成數據采集。系統在得到遠程數據中心的采集命令后,選擇適當的采集通道,并設置A/D模塊參數。在采集過程中判斷是否要停止,如果停止,任務處于等待掛起狀態。
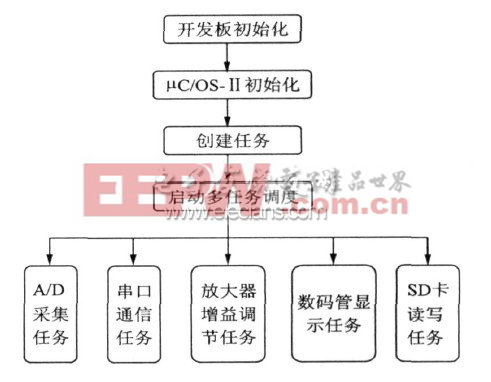
圖4 應用程序框架流程圖
4 結語
本系統采用了ARM+RTOS以及ARM+GPRS的方案,選取適當的器件構成了多路的數據采集系統,具有一定的實用價值。考慮到現場采集到的多是小信號,為了有較好的準確度和精確度,對A/D后的采集數據還要進行分析和調整,然后再發送到數據處理中心。為此,可以進行反復實驗,獲得多組數據,最后通過最小二乘法曲線擬合來提高準確度。另外,隨外界環境的變化,也可以修改擬合曲線以適應具體的應用。隨著3G時代的來臨,大量數據信息的傳輸成為可能,可以考慮采集現場的相關視頻信號。在短消息功能,數據加密技術以及軟件操作和文件管理上還有待進一步開發和優化。

c語言相關文章:c語言教程
熱電偶相關文章:熱電偶原理



評論