無刷直流電動機調速系統的混合模糊PID控制

模糊控制規則是專家的經驗和操作者的技能加以總結而得出的模糊條件語句的集合,此集合能夠保證控制器輸出能使系統的動靜態特性最佳,本文設計的系統需要有兩個規則庫,即模糊PID控制器的模糊規則庫A和模糊變積分參數的規則庫B。在整個控制過程中,先在模糊規則庫A中進行模糊PID控制,再使用規則庫B進行PID控制向誤差零點逼近,實際控制過程中兩組規則庫同時使用。根據BLDCM調速系統的特點和大量仿真實驗得出模糊控制規則如表1所示。本文引用地址:http://cqxgywz.com/article/159318.htm

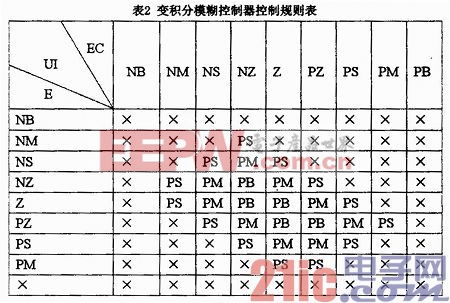
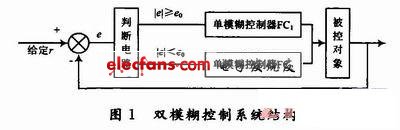
BLDCM調速前期,由于誤差較大,Ki為零,系統主要是模糊控制,使系統有很好的魯棒性,這時以規則庫A為控制規則。調速后期,速度基本接近于給定速度,誤差接近于零點時,誤差e較小,這時系統切換為模糊PID控制,此時使用規則庫A和B,對積分環節的參數實現在線調節,避免系統在切換過程中出現的“毛刺”,改善系統的控制性能。故在設計規則庫B時考慮系統誤差為零且超調量小。規則庫B如表2,表中“×”為積分控制死區,由模糊控制實線,即調速前期工作段。
3 系統仿真實驗
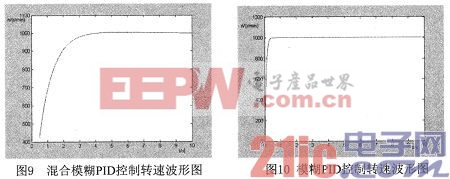
在Matlab中進行仿真實驗,其中速度環調節用本文設計的混合模糊PID控制器結構BLDCM控制系統從啟動到穩態運行的仿真結果如圖9與圖10所示。仿真結果表明,采用混合模糊PID控制算法,系統的動靜態及穩定性能都比模糊PID控制方法具有一定的優越性。
4 結論
本文提出將模糊變積分參數的模糊控制與PID算法相結合的一種新型控制器應用于BLDCM的速度環控制。仿真結果表明:系統的響應速度加快,沒有超調和震蕩,調節精度提高,具有較強的魯棒性,抗干擾能力好,這是單純的混合PID控制難以實現的系統特性,特別是對于非線性系統可以得到滿意的控制效果。

pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理

評論