鋼絲繩狀態無線監控系統節能方案研究與設計

2.2 TPSN時鐘同步算法的實現
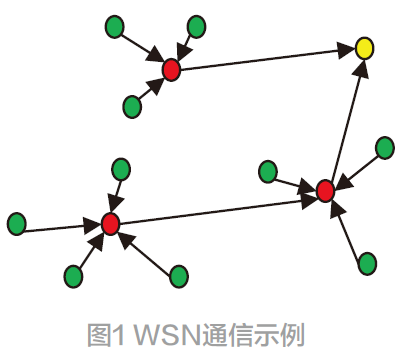
TPSN算法是通過多級的逐步同步,能夠實現全網范圍內的節點的時鐘同步,在多跳網絡中非常適用。其會在整個網絡中選擇一個根節點(設計中使用協調器作為根節點),由根節點提供整個網絡中的時鐘源,它采用的是層次型的網絡結構,其實現過程主要分為兩個階段:層次發現階段和同步階段。
在層次劃分階段主要進行的是對整個網絡的節點進行層次劃分,分為0~n個層次,其簡要結構如圖3所示。本文引用地址:http://cqxgywz.com/article/159441.htm

其中根節點一般定義為0級,它在時鐘同步階段的作用是廣播分組數據包,通過廣播的方法給每個節點分配一個層次號(不惟一)和ID號(惟一)。根節點的相鄰節點在收到分級的數據包后,會把自己的同步級別設置為1級。然后這個1級節點會繼續廣播分級數據包,其他的節點按照這個發放依次確定自己的級別,一直到網絡中的所有節點都設置了自己的級別,這個過程就完成了層次發現的階段。
第二階段為同步階段,該階段的主要任務是層次結構建立以后根節點通過廣播時間同步分組啟動同步階段。以根節點和1級節點進行時間同步為例子來介紹同步階段的整個過程。根節點和1級節點在進行時間同步是通過兩個節點之間的雙向信息的交換來實現的。其整個過程如圖4所示。
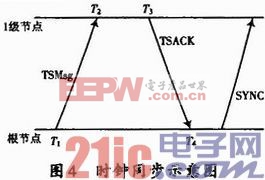
層次結構建立后,根節點通過廣播時間同步分組啟動同步階段,其中同步分組中包含有根節點的等級和發送信息報的本地時間T1。第1級節點在收到這個分組以后首先會檢查該信息包中的節點信息是否和其父節點即根節點的節點信息一致,如果一致則記錄收到該包時的時間為T2,否則丟掉這個同步包,然后1級節點在T3時刻發送應答分組給根節點,分組中含有1級節點的級別和T1,T2及T3的信息,根節點在T4時刻收到應答幀,因此可以推出以下公式:
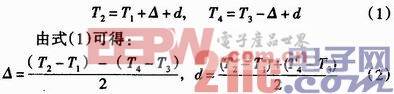
式中:△為根節點和1級節點之間的時間偏差;d為根節點和1級節點之間的傳輸時延,假設其雙向之間的傳輸時延相同。當1級節點收到根節點發送的同步信息報SYNC后,其中包含T1和T4,它根據式(2)就能計算時間偏差△和傳輸時延d,然后將自己的時鐘和根節點進行同步。
3 同步喚醒算法的研究與設計
3.1 問題的提出
本項目中利用無線傳感器網絡對擦窗機鋼絲繩運行過程中的狀態進行實時監測,提高擦窗機在運行中的安全性。但是由于擦窗機運行場景的特殊性及無線傳感器網絡穿墻能力的有限性,位于大樓不同樓面上的傳感器節點在擦窗機不在該樓面施工時,該節點是不會參與到數據的轉發過程中的,為了節省整個網絡的能量及延長整個網絡的生命周期,此時這些節點的運行是沒有必要的,為了減少網絡能量消耗應使其處于低功耗模式。
3.2 系統功耗模式
本設計采用CC2530單片機,其共有五種工作模式,分別為主動模式、空閑模式、PM1、PM2和PM3。主動模式為一般模式,PM3具有最低的功耗。其不同的供電模式對系統的影響如表1所示。
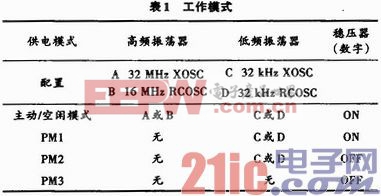
主動模式為全功能模式,空閑模式除了CPU內核停止運行,其他和主動模式是一樣的。PM1模式適用于相當短時間內的休眠時間。PM2模式適用于相當長時間內的休眠事件,特別是用于休眠定時狀態。在PM1和PM2模式中,系統可以通過重置或者一個外部中斷或者休眠定時喚醒轉入主動模式。PM3模式只能通過重置或者一個外部中斷轉入主動模式。在本設計中選擇PM2模式為低功耗模式,雖然PM3模式功耗最小,但是PM3模式必須通過外部中斷或重置才能重新進行數據收發工作,這在無線傳感器網絡應用中十分不實際。因為本設計的節點很多都處于樓層高處或外表面,無法通過采用外部中斷的方式進行喚醒。



評論