無刷直流電機直驅抽油機系統控制器設計

2.3 正反轉控制設計
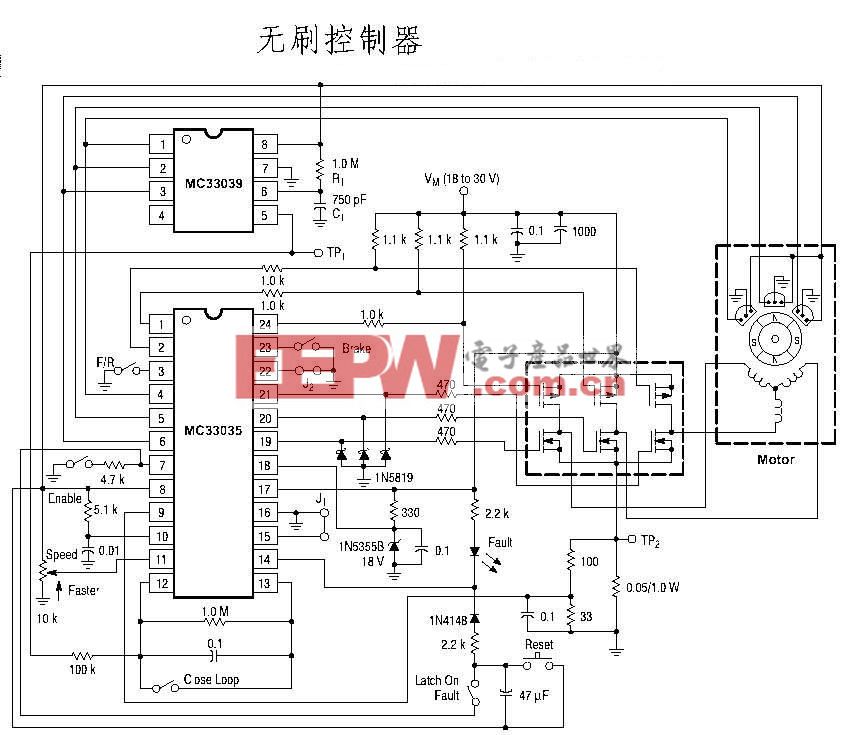
本設計用兩個霍爾位置傳感器H1,H2和兩塊磁鐵CT來實現電機的正反轉,兩個霍爾位置傳感器H1,H2分別安裝在抽油機架的上下止點,磁鐵CT安裝在平衡重塊的上下兩面各一塊,位置信號處理電路如下圖3所示。
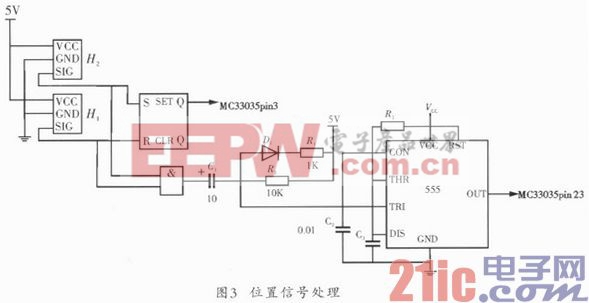
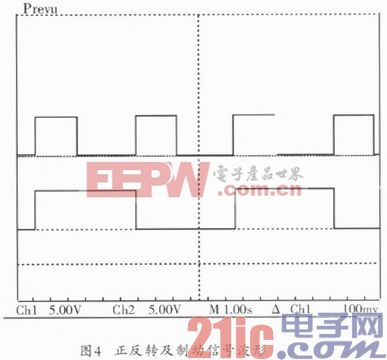
當CT隨電機的轉動靠近H1時,H1輸出低電平,H2輸出高電平,觸發器輸出低電平,H1,H2的輸出信號經與門后為低電平,南于5 V電壓源的升壓作用,使定時器輸入端由低電平瞬間變為高電平,所以其輸出暫穩態(高電平)結束后自動進入穩態(低電平),當電機反轉至CT接近H2時,H2輸出低電平,H1輸出高電平,觸發器輸出高電平,H1,H2的輸出信號經與門后仍為低電平,所以電機仍是由高電平變為低電平,轉向信號和制動信號波形如下圖4所示,波形1是制動信號,高電平制動且優先級最高,波形2是轉向信號,高電平時電機正轉,低電平時反轉,假設電機正轉,正轉過程中波形2為高電平,波形1為低電平,到指定位置后波形2變為低電平,波形1為高電平,由于波形1優先級高,它為高電平時間內波形2無效,此段時間是電機的正向制動過程,制動一定時間后波形1自動變為低電平,波形2的低電平起作用,電機開始反轉,反轉過程中波形1、2都為低電平,反轉到指定位置后波形2變為高電平,波形1也變為高電平,電機進入反向制動過程,制動一定時間后波形1自
動變為低電平,波形2的高電平起作用,電機開始正轉,如此反復,其狀態變化過程為:正轉→正向制動→反轉啟動→反轉→反轉制動→正轉啟動→正轉。

霍爾傳感器相關文章:霍爾傳感器工作原理
電荷放大器相關文章:電荷放大器原理 霍爾傳感器相關文章:霍爾傳感器原理



評論