基于Simulink仿真的用戶星天線控制系統分析

1.3 二相混合式步進電機
混合式步進電動機具有步距角較小,分辨率高,控制電流小,功耗低等優點,作為控制用電動機和驅動用電動機廣泛應用于工業領域。在用戶星天線跟蹤控制系統中,根據系統性能指標和星上環境要求,選擇二相混合式步進電機作為控制系統的執行元件。
對于二相混合步進電機,在不計定子極間和端部的漏磁,不計永磁體回路的漏磁,忽略磁滯和渦流的影響,忽略飽和的影響,忽略定子線圈自感的諧波分量,且繞組自感及繞組間互感不隨轉子機械角的變化而變化,步進電機的數學模型可以描述為:
這里諧波減速器簡化為一個減速比為N的剛性環節,并把負載轉動慣量向驅動端折算。式中,UA,UB分別表示施加在A相、B相繞組兩端的電壓;iA為A相電流,iB為B相電流;LA為A相電感,LB為B相電感;τ為變化的轉矩;p是轉子齒數;ke為轉矩常數;Tdm為靜態轉矩;J為轉動慣量,包括轉子轉動慣量和負載等效轉動慣量;D為粘性摩擦系數;Ddθ/dt是包括風損、機械損在內的摩擦轉矩,它也包含磁滯渦流所致的二次電磁效應;T1為負載轉矩;θ為電機輸出角度。
為滿足天線控制系統高穩定性和高可靠性的要求,選用的驅動主電路結構是H橋電路,驅動方式為斬波恒流驅動和電流細分驅動。為了使二相混合步進電機有恒定轉矩的輸出,需要精確控制繞組電流,在驅動電路中引入電流閉環,這樣就可以實現精確的電流控制。電流控制器根據繞組實際電流和給定電流的差值,通過H橋實現電流斬波控制,輸出繞組電壓信號。本文驅動方式采用帶有電流細分的斬波恒流驅動,給定繞組電流為:
式中:im為給定電流最大值:k為轉子步數;,n為細分數。
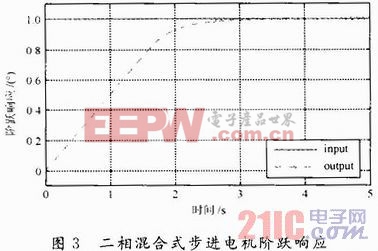
圖3為二相混合式步進電機的階躍響應。可以看出,輸出在平衡位置有輕微的抖動,這是因為步進電機是以離散的方式運行的,所以電機的步進角即為電機的最小前進角度,因此可能電機無法完全運行到給定位置,造成了轉子在平衡位置來回震蕩。本文引用地址:http://cqxgywz.com/article/159961.htm
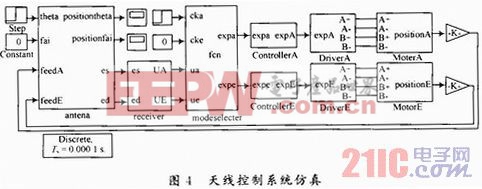
2 仿真分析
根據前面的分析,在Simulink里面建立了天線控制系統的仿真模型,如圖4所示,控制器采用速度PID控制,當角度偏差較大時,則轉速也隨之增大,電機以限定的最高轉速運行,使得位置偏差減小,這樣可以提高系統的輸出特性。控制器參數kp=1.2,kI=0.004。







評論