基于DSP的無刷直流電機控制系統的研究與設計

2.3 DSP部分設計
根據對電機數學模型進行的分析。為實現對無刷直流電機轉速的高精度可靠控制,本系統采用T1公司成熟的DSP產品TMS320LF2407。該數字信號處理器不但具有高速信號處理和數字功能所必需的體系結構的特點,而且其低成本、低功耗及高性能的處理能力以及豐富的內部資源,也對電機的數字化控制非常有用,此外,該數字信號處理器(DSP)內部還自帶高精度10位ADC模數轉換模塊和脈沖調制PWM模塊。
2.4 A/D信號檢測設計
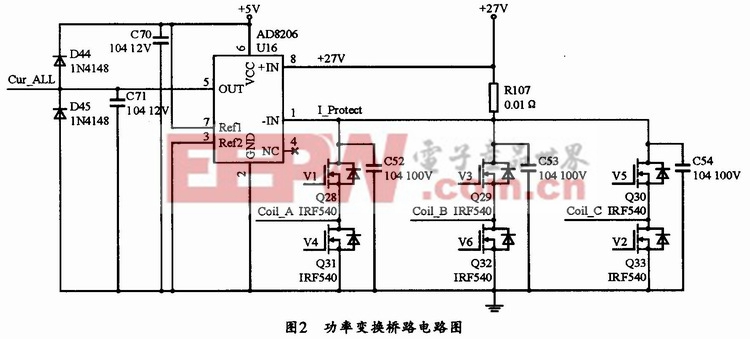
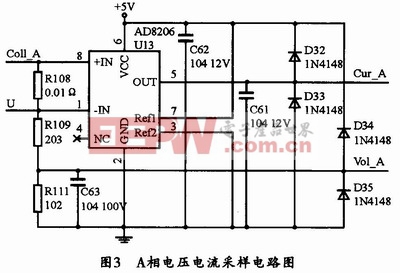
通過專用高端電流測量芯片AD8206以及高精度采樣電阻可以完成對A/D信號的檢測功能。即由三相功率變換橋路引出的Coil_A、Coil_ B、Coil_C分別經過高精度超低阻值的0.01Ω采樣電阻后,將引出U、V、W三線分別接至定子電樞的A、B、C三相線圈上,這樣即可通過檢測采樣電阻之上的電壓來檢測出各相電樞繞組上通過的電流。測試每相相對于地電壓的方法比較簡單,可以用電阻分壓法測試,A、B、C三相線圈上的電壓在U、V、W測試點上也可采用電阻分壓的方法得到,圖3所示是A相電壓電流的采樣電路。
3 系統軟件設計
3.1 系統控制總圖
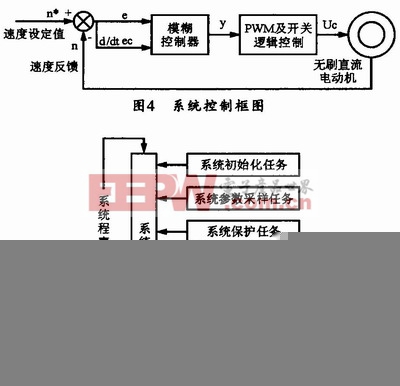
圖4所示是本系統的控制框圖。根據該控制框圖可將系統劃分為若干個子任務。其中包括系統初始化任務、系統參數采樣任務、系統保護任務、模糊控制計算任務、電機控制任務、通信任務等。任何時刻都只能有一個子任務被系統調度選中而進入系統的主循環中運行,此時,其他任務都處于休眠或者掛起狀態。以等待系統的調用。每一個子任務都是以一個死循環的函數形式出現并供系統調用,每個子任務的死循環的打斷和切換一般都以系統節拍時鐘為準。由系統調度器決定的、合適下一個應該調用的子任務框圖如圖5所示。
3.2 模糊控制參數的選擇
本模糊控制器以電機的轉速輸出與期望的速度輸出的偏差e以及偏差的變化率ec作為輸入變量來輸出電機的控制值的變化值。在模糊控制區內,可將速度偏差和偏差變化率量化為7個模糊子集,即模糊語言變量{負大,負中,負小,零,正小,正中,正大},簡記{NL,NM,N-S,ZO,PS,PM,PL}。
綜合考慮速度偏差和速度偏差變化率這兩個信號,可采用如下的模糊推力規則:
![]()
由于e和ec各有一個模糊子集,所以,共有49條模糊規則,其具體規則如表1所列。









評論