全方位移動機器人模糊PID運動控制研究

2.3 參數自整定規則
模糊控制設計的核心是總結工程設計人員的技術知識和實際操作經驗,建立合適的模糊規則表,得到針對kP,k1,kD三個參數分別整定的模糊控制表。根據kP,k1,kD三個參數各自的作用,可制定模糊控制規則。以kP,k1,kD為例,所列規則見表2,k1,kD。可類似推出。本文引用地址:http://cqxgywz.com/article/163808.htm

2.4 輸出量解模糊
依據速度模糊控制參數整定規則確定輸出量后,得到的只是一個模糊集合,在實際應用中,必須用一個精確量控制被控對象,在模糊集合中,取一個最能代表這個模糊集合的單值過程稱為解模糊裁決。常用的解模糊算法有最大隸屬度法、加權平均法等,根據實際情況,采用加權平均法進行解模糊。此時,模糊控制器輸出可表示為:

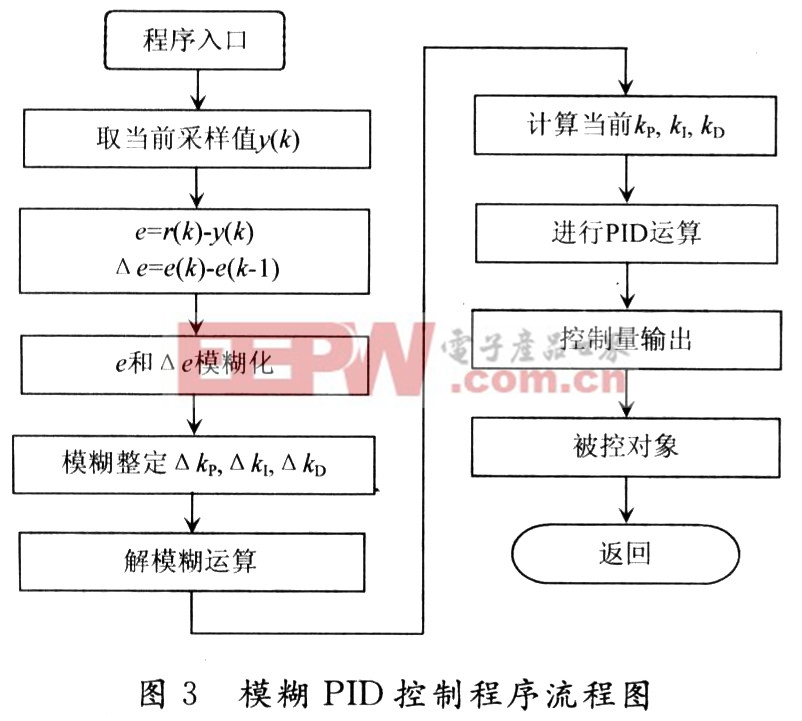
最后,根據式(3)可得到最終的PID控制器參數。模糊PID控制程序流程圖如圖3所示。
3 實驗結果
為了驗證參數模糊自整定PID控制器的有效性,對直流電機分別做了常規PID控制和模糊PID控制實驗。實驗中給定輪速為50 min,圖4為采用常規PID控制方法控制的電機轉速;圖5為采用模糊PID控制方法控制的電機轉速。從結果看,采用參數模糊自整定PID算法能夠明顯降低超調量,加快響應速度,改善控制系統對輪速的控制效果。

4 結 語
機器人運動控制系統是整個Robocup機器人系統的執行機構,在場上的表現直接影響了整個足球機器人系統。以足球機器人為平臺,考慮到系統的時滯性和非線性,采用了模糊控制與PID控制相結合的方式,并在自行研制的足球機器人上進行了速度控制的實驗研究。結果表明,該方法彌補了常規PID控制應用在機器人運動速度控制時超調量大,響應時間長的缺點,可以取得理想的效果。目前該方法已應用于足球機器人的運動控制,并在第七屆中國機器人大賽暨ROBCUP中國公開賽中取得了優異的成績。










評論