基于模糊神經網絡的移動機器人沿墻導航控制

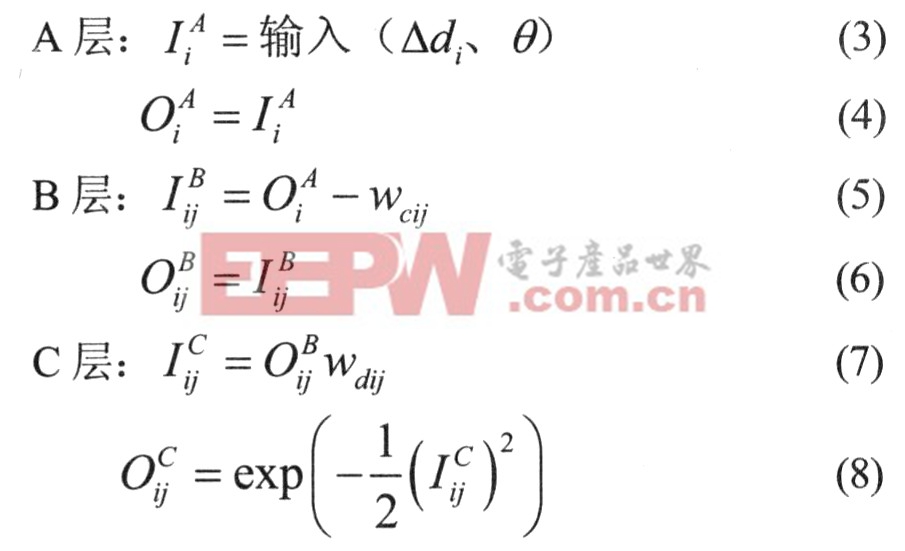
B,C為模糊化層,即使用模糊語言來反應輸入量的變化,隸屬函數采用高斯函數,隸屬度計算公式如下:
連接權重We、Wd決定了隸屬函數的形狀。
D層為模糊推理層,目的是將輸入量進行綜合處理,共采用了25條規則,它們由C,D,E的連接表示出來。模糊規則如下:
lf △di is M andθis N,then Vl is K and Vris L.
其中M=NB,NS,Z,PS,PB;N=L,LS,Z,RS,R;K,L=TL,G,TR。
E、F、G層為去模糊化層。F層有10個神經元,5個對應移動機器人的左輪速度,5個對應右輪速度。F層的結果隸屬函數使用三角形隸屬函數,目的是把在E層模糊語言描述的隸屬函數轉化為具體數值的隸屬度。G層求解模糊結果,采用重心法,也叫加權平均法。求解過程是以控制作用論域上的點vi(i=l,2,…,n)對控制作用模糊集的隸屬度u為權系數進行加權平均而求得模糊結果,對于離散論域vi:

3 沿墻導航控制計算模型
圖l所示即為本文采用的BP前饋型神經網絡結構,計算模型如下(I為該神經元的輸入值,O為輸出值,上標表示神經元所在的層):
D層:由輸入變量自動生成模糊規則。

F層:輸出隸屬函數使用三角形函數,隸屬度計算公式如下:











評論