基于PIR的移動檢測系統的實現

4.開發軟件
現在,我們已經定義了模擬接口,下一個關鍵的設計任務是設計控制該系統的軟件。
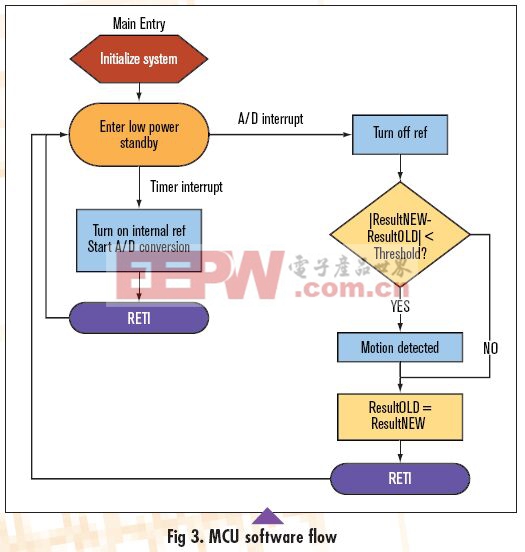
再次強調,兩個主要的目標是低成本和低功耗。為滿足這兩個目標,我們在選擇硬件時無疑用了很多心思。這種硬件不僅因模擬/數字混合集成而使成本更低,而且因為集成型器件更易于進行電源管理,功耗也更低。當然,為切實實現設計目標,開發高效的軟件也是非常關鍵的。圖3顯示了該系統的軟件總體流程。
該軟件的關鍵是使整個系統由中斷驅動。這意味著除非有事要做CPU不執行任何指令。在這種情況下,CPU處于低功耗待機模式并等待兩個事件之一:定時器中斷(表明將開始一次新的AD轉換)或AD轉換器中斷(表明已得到轉換結果)。
一旦得到了轉換結果,則把它與上次采樣相比較。把差值的絕對值與用戶定義的設定點比較,如果超過則表明存在移動。總的來說,這個簡單的流程可通過內部定時器非常靈活地定義采樣速率,而且在處理轉換結果時不使用標志輪詢或軟件延遲。
5.確定功率需求
在該系統的工作壽命內,MSP430F2003 MCU大部分時間運行在低于1μA的低功耗模式,只需單一的CR2032 3V紐扣電池就可實現長期供電。該系統使用內置的內部低頻振蕩器作為定時器的時鐘,每340ms開始一次新的轉換。大約每秒3次采樣的采樣速率聽起來似乎很慢,但由于在人類交感應用中傳感器輸出信號的變化速度非常慢,這樣的低采樣速率已足以實現可靠的移動檢測。使用可快速啟動的高頻內部時鐘源(頻率設定為1MHz)來驅動該AD轉換器可使每次采樣的轉換時間為1.024 ms。從低功耗角度來看,保持轉換時間盡可能短是重要的,因為內部參考電壓和AD轉換器的耗流量占總耗流量的70%以上。
為對該系統的耗流情況有更清晰的印象,下表詳細列出了該系統各部分的工作電流和平均電流。
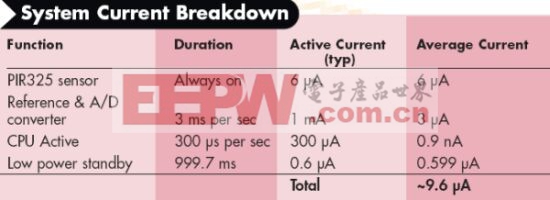
系統總電流將取決于系統的最終方案。從該表可以看到,工作狀態的耗流量主要取決于參考電壓和AD轉換的電流,而平均耗流量主要取決于傳感器電流。因為PIR325傳感器的接通調整時間(幾秒或更長)較長,不能采用對傳感器采用周期式通電(Power cycling)的方式。盡管該傳感器必須保持連續接通,但電流消耗仍然很低。采用這里給出的硬件設計和軟件流程,可以實現總平均電流低于10μA的通用移動檢測系統。如果使用標準的3V CR2032電池,工作時間可超過兩年。
本文小結
到此,我們已經介紹了使用標準PIR傳感器設計的一個簡單的移動檢測器。硬件是簡明的,而軟件是一個簡單的中斷驅動型程序。向這個設計中增加一個菲涅耳光學鏡片來提高傳感器的方向性,增加一個簡單的繼電器來驅動泛光燈或到宿主處理器的通訊通道(對保安系統),則可以實現一個完整的末端應用系統。移動檢測不過是正確選擇MCU和傳感器的說法看來并不準確。









評論