基于單片機智能機器人控制系統研究設計

每個繼電器相當于一個單刀雙擲開關,由此,兩個單刀雙擲開關,組成電動機正反轉控制電路,實現機器人前進、后退動作。
2.2 視覺電路
在此設計中,我們僅要求機器人發現并跟蹤目標,不需要識別目標。因此采用最常用的紅外線反射傳感器來作為機器人的視覺功能,檢測機器人前方是否有目標。該功能的實現采用的是兩個型號為TX05D的紅外線反射傳感器[4]。TX05D常用的紅外反射式接近開關,它內部有一紅外線發射管和一紅外線接收管。發射管發出紅外線,如果其正前方沒有物體,那么接收管接收不到紅外線反饋信號。當前方出現物體時,紅外線信號經過物體被反射了回來,這時接收管接收到信號,向單片機發出高電平信號,以告知單片機其前方出現障礙物。
兩個紅外線傳感器安裝在機器人前方的兩側,在機器人工作時,兩個傳感器始終向外發射紅外線探測信號,當其中一個傳感器接收到反饋信號時,便向單片機發出高電平信號,告知單片機該方向發現目標,單片機經過判斷后,控制電動機向該方向轉向,以實現跟蹤功能。當兩個傳感器都感應到目標時,機器人便向著目標直著前進,直到撞上目標。
2.3 步伐調整電路
當機器人在前進過程中,如果電機轉速不一致或者在轉向過程中打亂了步伐,這時便會啟動步伐調整功能,該功能是利用兩個光耦來完成的。在機器人腿部,裝有兩片通過光耦的擋片,當機器人正常行走時,擋片會交替的打開和關閉光耦。如果兩個光耦的狀態始終不相同。那么就說明該機器人步伐正常。當光耦狀態出現相同時,說明機器人步伐錯亂,需要校正步伐。這時便會隨機停下一條“腿”,等另一條“腿”走在合適位置,即光耦狀態相反時,再作出同步前進。電路如圖3所示。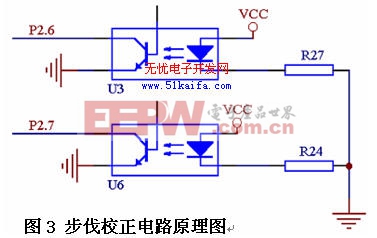
2.4顯示電路
本功能主要實現了人機交互的視覺平臺。本設計采用LCM1602液晶顯示模塊,該模塊是最常用的英文顯示模塊,它內部含有英文字庫,使用方便,價格便宜。液晶顯示功能是配合語音功能共同使用的附加功能,它的作用就是可以顯示當前的狀態,以實現機器人的人機交互顯示功能。
LCM1602是一種16字×2行的字符型液晶模塊[5],主要有總線連接方式和模擬口連接方式。本設計采用的是模擬口連接方式,它和前者相比,電路更加簡潔。在該電路中,P1口給顯示屏輸送數據,P3.0到P3.2則控制向該顯示屏讀寫數據的狀態。VL管腳過1K電阻接地,作用是限制液晶顯示的色度深淺。BLA和BLK則是背光燈電源接口。電路如圖4所示。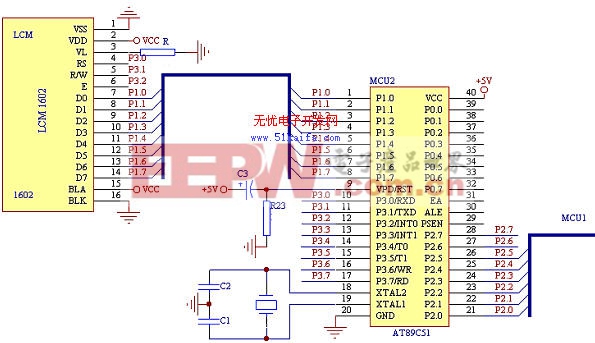
圖4 顯示電路原理圖











評論