基于ARM 的高分辨率壓電陶瓷驅動電源設計方案(一)

3.2 放大電路的改進
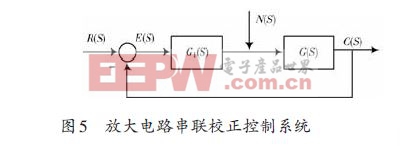
這里將PA78視為被控對象G(S),將失調電壓和溫漂視為擾動N(S),這樣就把提高放大器輸出電壓精度轉化成減小控制系統的穩態誤差的控制器設計的問題。在控制器的設計中常用的校正方法有串聯校正和反饋校正兩種。一般來說反饋校正所需的元件數少、電路簡單。但是在高壓放大電路中,反饋信號是由PA78的輸出級提供。反饋信號的功率較高,為元件選型和電路設計帶來不便,故線性放大電路中不使用反饋校正法。而在串聯校正方法中,有源器件的輸入不包含高壓反饋信號,所以該設計采用串聯校正方法,采用模擬PI(比例-積分)控制器G1(S)進行校正,如圖5 所示。
成比例的反應輸入信號e(t)及其積分,即:
由式(2)觀察可得,PI控制器相當于在控制系統中增加了一個位于原點的開環極點,開環極點的存在可以提高系統的型別,由于系統的型別的提高可以減小系統的階躍擾動穩態誤差(對于線性放大電路,可視失調電壓和溫漂為階躍擾動)。同時PI控制器還增加了一個位于復平面中左半平面的開環零點,復實零點的增加可以提高系統的阻尼程度,從而改善系統的動態性能,緩解由犧牲的動態性能換取穩態性能對系統產生的不利影響。
放大電路的設計中采用有源模擬PI控制器,改進后的線性放大電路如圖6所示。其中PI控制器的放大器采用AD8676,AD8676的輸入失調電壓低于50 μV(滿溫度行程下),電壓噪聲≤0.04 μV(P-P)@0.1~10 Hz,因此適合用于串聯校正環節,以提高系統穩態性能、減小輸出電壓漂移。
3.3 相位補償
從工程角度考慮,由于干擾源的存在,會使系統的穩定性發生變化,導致系統發生震蕩。因此保證控制系統具有一定的抗干擾性的方法是使系統具有一定的穩定裕度即相角裕度。
由于實際電路中存在雜散電容,其中放大器反向輸入端的對地電容對系統的穩定性有較大的影響。如圖6所示,采用C5和C6補償反向端的雜散電容。從系統函數的角度看,即構成超前校正,增加開環系統的開環截止頻率,從事增加系統帶寬提高響應速度。
PA78有兩對相位補償引腳,通過外部的RC網絡對放大器內部的零極點進行補償。通過PA78的數據表可知,PA78內部的零極點位于高頻段。根據控制系統抗噪聲能力的需求,配置RC網絡使高頻段的幅值特性曲線迅速衰減,從而提高系統的抗干擾能力。圖6中,R4,C1與R5,C2構成RC補償網絡。
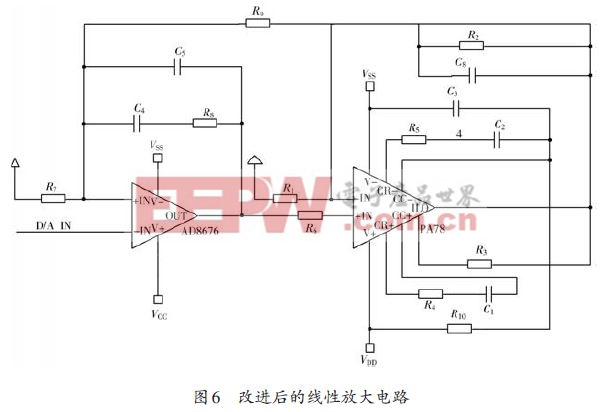
此外電路中C3的作用是防止輸出信號下降沿的振動引起的干擾;R10起到偏置電阻的作用,將電源電流注入到放大器的輸出級,提高PA78的驅動能力。
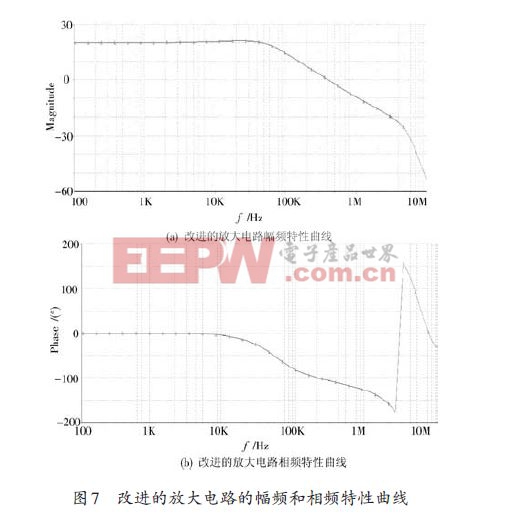
將PI控制器的參數分別設置為KP=10、KI=0.02;超前校正補償電容分別為12 pF和220 pF;RC補償網絡為R=10 kΩ、C=22 pF.利用線性放大電路的Spice模型進行仿真得到幅頻特性和相頻特性曲線如圖7所示。從圖中觀察可得,放大系統的帶寬可達100 kHz,從而保證了系統良好的動態特性,同時相角裕度γ>60°使系統具有較高的穩定性(由于PZT的負載電抗特性一般呈容性,所以留有較大的相角裕度十分必要)。

電子管相關文章:電子管原理









評論