UPS逆變器的重復控制器參數的仿真分析

的位置在ω=π/T處。
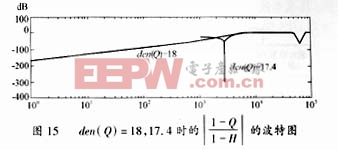
通過仿真實驗發現依照這種方法選取的Q,其輸出穩態誤差比Q取作常數時更小得多(參見圖11),這是因為低通Q實現了更好的跟蹤krzkPS軌跡的效果,尤其是在高頻的時候。比較圖13,圖14中H的幅相頻曲線上可以很清楚地反映不同Q跟蹤krzkPS的過程。本文引用地址:http://cqxgywz.com/article/179772.htm
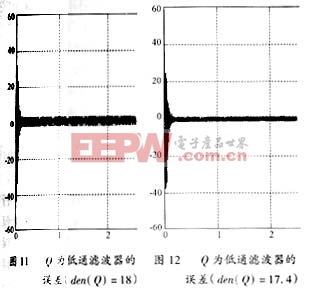
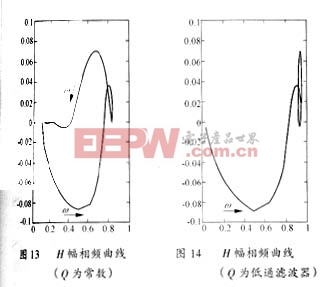
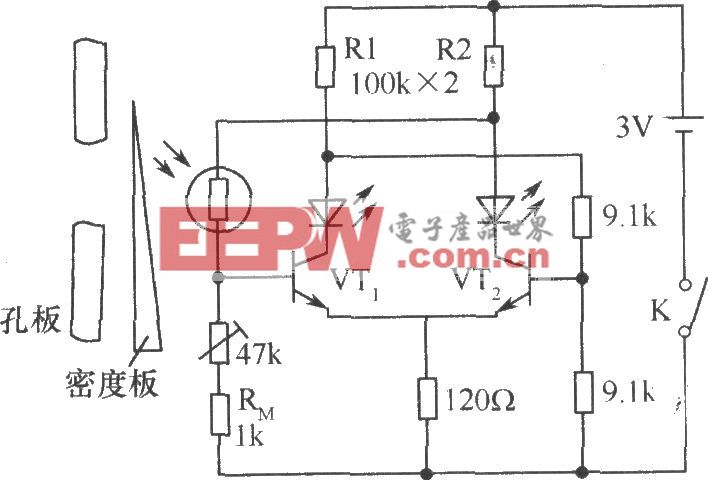
當適當調整den(Q),系統的穩態誤差也跟著變動,而且調到適當位置,穩態誤差將被降得很小。圖11中den(Q)=18,圖12中den(Q)=17.4時,而穩態誤差圖12明顯小于圖11。繪出den(Q)=17.4,18時的![]() 的波特圖(見圖15),雖然den(Q)=18在中低頻段比den(Q)=17.4的幅值小,但den(Q)=17.4在103-104間有一個波谷,在該處的幅值比den(Q)=18小得多,所以其總體效果要比den(Q)=18好。
的波特圖(見圖15),雖然den(Q)=18在中低頻段比den(Q)=17.4的幅值小,但den(Q)=17.4在103-104間有一個波谷,在該處的幅值比den(Q)=18小得多,所以其總體效果要比den(Q)=18好。
4結語
根據前面的討論,在重復控制器的設計中,關于關鍵參數補償器Q的設計,可以做出以下總結:
1)通過調節Q,可以提高系統的穩態精度,改善系統性能。
2)Q有兩種選擇:常數與低通濾波器,后者比前者的控制性能更優,但增加了軟件實現上的難度。
3)當Q選取為低通濾波器時,若適當調節Q的分母,可以大大降低系統的穩態誤差。



評論