水下航行器模擬平臺智能小車的設計

2.1.2 大氣參數的采集
大氣參數主要包括大氣溫度、大氣壓強和大氣濕度,由相關的傳感器采集,溫壓濕采集板的框圖如圖3所示。本文引用地址:http://cqxgywz.com/article/185452.htm
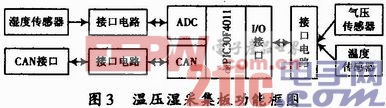
溫度的測量使用高精度的傳感器DS1820數字溫度計來獲取,提供了9位溫度讀數指示器件的溫度,測量范圍從-55~+125℃,增量值為0.5℃。
大氣壓強的測量用集成氣壓傳感模塊MS5561來實現,它是一款集成有壓阻式壓力傳感器和ADC接口的SMD混合集成電路,可提供依賴于壓力和溫度的16位數據字,可通過3線串行接口與微處理器進行通信。
大氣濕度的測量用高精度的傳感器SY-HS-220來獲取,只需通過單線接口與單片機相連,再通過A/D轉換,算法處理即可獲得濕度值。
2.1.3 數字羅盤
主要目的是給出平臺的朝向值,來修正加速度和風向。S24-H是一個平面羅盤和雙軸傳感器的組合產品,由一個處理單元分別測量運算出羅盤和傾角的數據信息,然后放在同一組數據包中輸出,產品輸出接口同時提供TTL和485兩種方式,默認傳輸速率為19 200 b/s。
2.1.4 激光測距系統
激光測量系統LMS200,是基于飛行時間測量原理(激光雷達),通過激光發射到被反射回激光測距儀的時間算出障礙物和激光測距儀之間的距離。

式中:ρ是障礙物到激光測距儀的距離;V是光速;t是從激光發出到被反射回來的時間。
2.2 遠程無線板設計
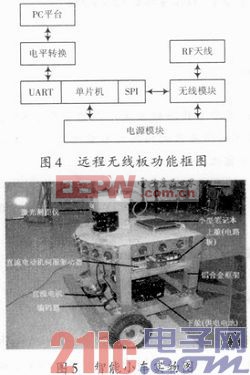
無線數據傳輸通過RFC-30F無線通信模塊實現。RFC-30F單片無線收發器工作在433 MHz的ISM頻段。由頻率調制器、解調器、RF功放和調節控制器組成。遠程無線板的框圖如圖4所示。
衛星接收模塊采用中國臺灣省長天科技股份有限公司產品,型號為GM-82,是一個具備全方位完整的衛星定位接收器。
2.3 電機的驅動部分
主要由空心杯直流電機、ED系列直流電動機伺服驅動器和編碼器組成,通過單片機的普通I/O口和PWM控制直流電機驅動器,使空心杯直流電機在驅動器的控制下轉動,編碼器負責測量電機的實際轉速,在程序上用電機的轉速閉環(PID)控制,用無線控制手柄對速度進行實時的控制。實物圖如圖5所示。

pid控制相關文章:pid控制原理
模擬信號相關文章:什么是模擬信號





評論