支持向量回歸機在風電系統槳距角預測中的應用

2.3 Matlab仿真
2.3.1回歸擬合
在Matlab編程實現函數的回歸擬合,并檢驗數據。主函數程序段如下:

2.3.2 函數回歸擬合并檢驗的仿真結果
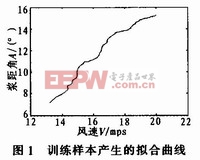
應用Matlab支持向量機工具箱編程實現系統的學習訓練過程,由80個學習樣本訓練而得到的函數擬合結果如下圖1所示。本文引用地址:http://cqxgywz.com/article/187585.htm
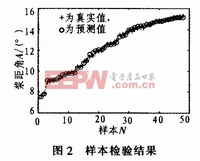
利用訓練好的神經網絡模型可以對槳距角進行預測,只要輸入即時風速,就可確定出相應槳距角大小。之前利用BP算法的均方誤差為0.290 3,LM算法的均方誤差為0.278 1。圖2為由SVR算法對48個樣本值檢驗的結果。可知,預測值與實際槳距角值基本一致。擬合誤差err=0.175 6。
3 結束語
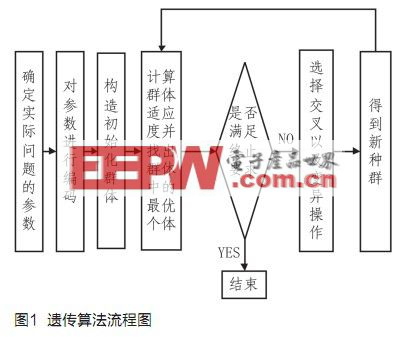
文中介紹了支持向量機的回歸算法理論,用SVR算法代替之前的BP算法和LV算法,研究了風力發電系統中隨風速變化槳距角的值,由函數擬合理論對槳距角進行了預測并檢驗,由于支持向量機采用結構最小化原則代替經驗經驗最小化原則,采用適當的核函數,同比其他算法使擬合誤差達到了最小,大大提高了變槳距系統的精度和效率。將該算法應用于DSP芯片上稍作改進,加上外圍電路的設計,即可應用在風電系統的控制領域。


評論