自觸發脈沖激光測距飛行時間測量研究

激光脈沖的發射和接收是循環相關的,這一過程可以表示為
TK+1=F(TK,△T) (2)
其中TK,TK+1分別為第K個和第K+1個激光脈沖發射時刻,函數F的具體形式和測量系統有關,它表示第K個和第K+1個激光脈沖之間的發射時刻關系。不同的系統具有不同函數形式F。
從激光發射單元向被測目標發射的是周期激光脈沖序列,可以描述為
TK+N=TK+NT0 (3)
其中N為整數,T0為發射的激光脈沖序列的周期,其值由式(2)決定。自觸發脈沖飛行時間激光測距方法可由基本方程(1),(2)和(3)描述。從這3個基本方程,可以得到被測距離的表達式:
D=F(NT0,τ) (4)
其中,τ為由系統延時決定的時間常數,其大小由測量系統的結構和帶寬等因素決定,NT0為包括N個連續周期的待測量時間間隔,函數F的形式由測量系統具體結構決定。本文引用地址:http://cqxgywz.com/article/193796.htm
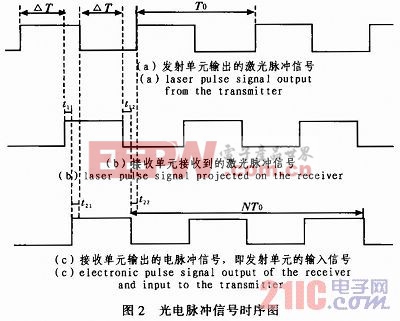
發射單元由接收單元輸出的電信號所控制,即測距脈沖是由接收單元觸發的。該過程的光電脈沖信號時序圖由圖2所示。開始時,發射單元向被測目標發射一束激光;經過△T(光從發射單元到目標然后返回到接收單元的傳播時間)的延時,經被測目標反射的光束被接收單元的光電二極管接收;光電二極管輸出的電信號經放大和時刻鑒別后,輸出一高電平信號,作為發射單元的輸入信號,其間電路延時t11;此高電平信號使激光驅動源終止驅動激光器,激光發射單元停止發射激光,其間電路延時t21;而后經過△T的延時,光電二極管從有激光接收狀態轉變為無激光接收狀態;再經過t12的電路延時,接收單元的輸出轉變為低電平;此低電平信號使激光器再次發射激光,其間電路延時t22。上述過程構成了自觸發脈沖飛行時間激光測距的一個完整周期。如此周而復始,就形成了周期激光脈沖序列。該測距信號從接收單元取出,輸入到周期測量單元獲得周期T0。根據公式(2),函數F有如下的形式
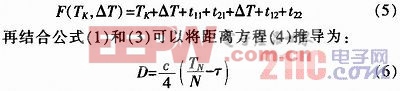
其中TN=NT0,τ=t11+t21+t12+t22,通常情況下t11≠t12,t21≠t22。在自觸發脈沖測距方法中,周期T0可以通過測量一次時間間隔TN后取平均值得到,這其中包括N個周期T0,其精度等效于用傳統的脈沖測距方法進行N次單次測量后取平均的結果。因此,自觸發脈沖測距方法可以在獲得高精度測距結果的前提下極大地縮短測量時間,提高測量速度。與其他傳統脈沖測距方法相比,自觸發脈沖方法的本質特點是脈沖測距信號不是單個而是連續周期性的。
2 基于CPLD的飛行時間測量單元實驗設計
CPLD具有集成度高,工作速度快,編程方便和價格低廉的優點。與FPGA(Field programmable gate array)相比,CPLD內部邏輯結構簡單,連線相對固定,延時小且可以預測,更有利于器件在高頻下工作,特別適合產品樣品的開發與實驗。
本設計采用ALTERA公司MAX II系列CPLD器件實現自觸發脈沖激光測距的飛行時間測量系統。MAX II系列器件是在ALTERA公司的第三代MAX結構基礎上,采用先進的COMSEEPROM技術制造的高密度,高性能的可編程器件。MAX II系列器件采用0.18μm Flash工藝,邏輯單元數(LE)240個、宏單元數192個、最大用戶I/O管腳80個、用戶Flash存儲器8 k,引腳到引腳的延時為3.5 ns,計數器頻率可以高達300 MHz。MAX II系列器件內置JTAG BST電路,通過JTAG接口可實現在線編程,從而可以靈活修改設計,縮短了開發周期。圖3是利用CPLD實現的自觸發脈沖激光測距飛行時間測量系統的電路框圖。




評論