基于支持向量機的無人機視覺障礙檢測

3 實驗結果
不同樣本分布對應不同的SVM模型,因為樣本線性不可分,因此選擇C-SVM進行訓練。核函數參數的選擇也會影響分割效果,不同參數情況下圖像分割結果如圖4所示。從上述這些圖可以看出,σ的取值直接影響圖像分割的效果,在一定的范圍內,σ取值越小,分割效果越好,如果σ過小,會使分割效果變壞,如圖5所示。然而當訓練集線性不可分時,分類超平面存在錯分,懲罰因子c控制對錯分樣本的懲罰程度,c越大,對錯分的懲罰越重,它在最優超平面與最近的訓練樣本之間的距離最大,與錯分樣本數最少之間進行折衷,直接影響著分類器的容量,從而影響著分類器的泛化性能。隨著c的增大,對錯分樣本的懲罰增大,錯分樣本減少,分類間隔減小,分類器的VC維增大,分類器的泛化性能變差;隨著c的減小,對錯分樣本的懲罰減小,錯分樣本增多,分類間隔增大,分類器的VC維減小,分類器的泛化性能也變差。因此,c的取值不宜太大,也不宜太小。當c=1,σ=0.000 5時,分割效果較為理想,非天空區域中的黑色部分原圖中白色墻壁反光造成的,如圖7所示。本文引用地址:http://cqxgywz.com/article/194144.htm

對圖7的分割效果圖進行形態學操作,得到障礙檢測結果圖如圖8所示。
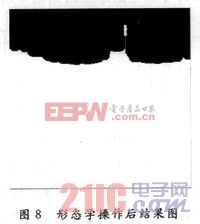
圖8中黑色聯通部分即為無人機低高度飛行的安全區域,下面白色聯通域即為需要回避的障礙,這樣就成功快速地檢測到了障礙,為后續的無人機視覺制導障礙回避做好了準備工作。不同于傳統的模式識別方法,支持向量機不是以假設樣本數目無窮大為前提進行研究的,其理論基礎統計學習理論是專門針對小樣本統計理論的,因此在有限樣本情況下表現出良好性能,并且計算速度快,實時性好。
4 結語
本文使用具有小樣本分類優勢的支持向量機對未知環境圖像進行分割實現無人機視覺障礙檢測。該算法結合了圖像空間彩色信息將圖像中的感興趣區域和非感興趣區域區別開,體現了支持向量機在圖像分割中的優越性能。實驗表明,支持向量機圖像分割方法可以有效準確地檢測出無人機低高度飛行中的障礙,為后續無人機視覺制導提供有用信息。






評論