生物超弱發光采集系統及控制電路設計

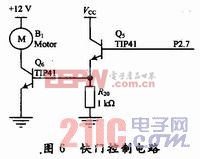
電子快門驅動電路如圖6所示,開關管連接單片機P2.7口,由單片機控制快門的開啟和關閉。當單片機P2.7口輸出為“0”時,快門關閉;當單片機P2.7口輸出為“1”時,快門打開。用示波器測量驅動電路的延遲時間在1μs以內,考慮到快門的延遲也在1μs,可以認為快門總體的延遲對測量的影響可以忽略。本文引用地址:http://cqxgywz.com/article/195126.htm
3 系統軟件設計
系統軟件部分采用模塊化設計方法,將整個程序劃分為若干模塊,通過主程序對各個子模塊的調用,將模塊連接成一個完整的程序。
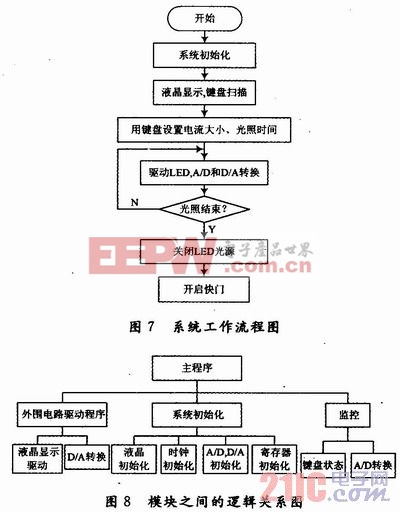
根據系統控制功能的要求,確定了系統軟件的主要功能有:系統初始化,寄存器設定,鍵盤設定初始值(光照時間,快門開啟時間,流過LED的電流值大小),液晶顯示控制,電子快門控制。根據軟件的功能要求,圖7給出程序總體流程結構圖,圖8表示各模塊之間的邏輯關系。
4 儀器測試
系統硬件連接完成,軟件調試通過后。接著對儀器進行了測試。
4.1 光源測試
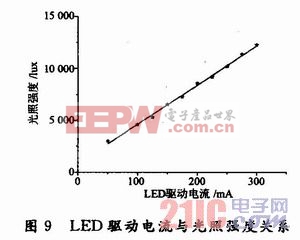
使LED驅動電路的電流在O~300 mA范圍變化,測試LED的發光強度。測出驅動電流與光強的關系如圖9所示。


評論