CCD物體重量實時動態監測的研究

信號經過預處理后,還不能被DSP所接受。需要把信號進行A/D數據轉換,在A/D轉換時采用TI公司的A/D芯片TLC5510,它是一種高速A/D轉換器。A/D轉換是在DSP的控制下進行的。TLC5510的工作特點是:當采樣時鐘為高電平時,A/D轉換器處于跟蹤狀態;時鐘下降沿時,輸入信號被保持,A/D轉換器進入轉換狀態,轉換數據延遲2.5個時鐘周期后在時鐘上升沿輸出。這樣對于A/D采樣,每一個時鐘到來時就會有采樣數據輸出。因此TLC5510除了數據線外,就包含一個輸出允許(
RPT 每行采樣點數
WRITA Smem
本系統采用TMS320C5409為核心的數據處理系統。TMS320C5409是16bit定點DSP,它使用改進的哈佛結構,具有專用的硬件邏輯的CPU、片內存儲器、片內外圍設備以及一個高度專業化的指令集。在運算過程中,DSP以中斷方式讀取A/D采樣結果。整個系統是CCD傳感器光采樣與A/D數據采集、DSP數據處理三級流水線結構。所采用的CCD有效光敏元數為2048,驅動時鐘選為1MHz,CCD光積分周期T至少需要2。084ms。CCD是串行輸出,DSP是成組使用數據,所以要設置數據緩沖區存放AD采樣數據。數據存儲器中要劃出兩塊緩沖區分別進行數據采樣與處理,緩沖區的切換通過軟件實現,即當其中一塊進行AD采樣,同時另一塊對前一時刻的AD轉換數據進行數據處理。
四、數據處理
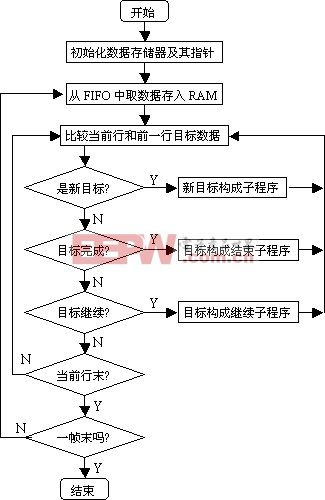
在數據處理中,CCD傳感器分奇偶場輸出電信號,首先將它存到先入先出(FIFO)緩沖器,DSP從FIFO中取數字信號時,就可以實現數據的實時處理。一個目標通常覆蓋了連續幾行上的像元,每個目標在覆蓋行上的起始位置和連續幾個像元處的強度值已存在FIFO中。實時算法每次只需FIFO中連續兩行的目標信號,比較當前行和前一行上目標起始位置和終止位置,即可確定一個目標的構成是剛開始還是在繼續或是已完成,直到所有行數據處理完畢,這樣所有目標像點的坐標就計算出來了。算法流程圖如圖3所示。它們的重心坐標公式如下:
 |  |
 |
Xc,Yc為二維重心坐標;Xi,Yi為第i個像元的序號;Vi為第i個像元對應的信號幅值。
DSP采用重心算法對目標位置y′進行計算時,AD采樣選用8bit的AD芯片,系統檢測精度可達到1μm以下。可見系統誤差非常小,測量很準確。
五、總結
本系統硬件簡單,功能強大,接口方便。高速的A/D轉換器的采樣速率也很容易用軟件來控制,DSP系統運行速度高、編程很靈活、穩定性好、可重復性好、集成也方便,特別是所采用的重心算法,具有算法簡單,運算速度快等優點。本系統不僅可以應用于測量橋梁載重,而且還可應用于測量運動物體(煤車、火車等),具有較高的測量精度和實時性。




評論