SPI、IIC、UART、can區別

響應
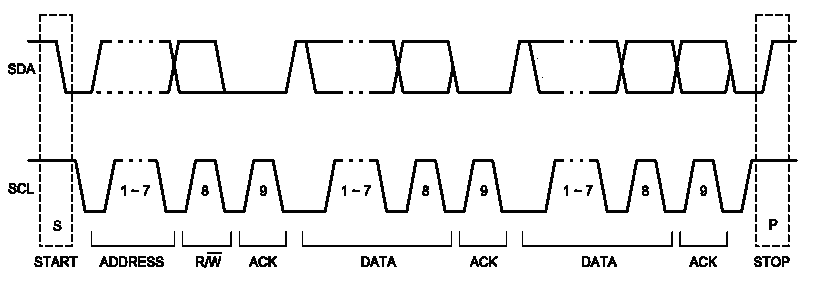
圖5 完整的數據傳送過程
3 總線基本操作
I2C規程運用主/從雙向通訊。器件發送數據到總線上,則定義為發送器,器件接收數據則定義為接收器。主器件和從器件都可以工作于接收和發送狀態。 總線必須由主器件(通常為微控制器)控制,主器件產生串行時鐘(SCL)控制總線的傳輸方向,并產生起始和停止條件。SDA線上的數據狀態僅在SCL為低電平的期間才能改變,SCL為高電平的期間,SDA狀態的改變被用來表示起始和停止條件。參見圖1。
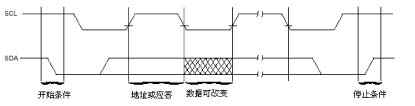
圖1 串行總線上的數據傳送順序
3.1 控制字節
在起始條件之后,必須是器件的控制字節,其中高四位為器件類型識別符(不同的芯片類型有不同的定義,EEPROM一般應為1010),接著三位為片選,最后一位為讀寫位,當為1時為讀操作,為0時為寫操作。如圖2所示。
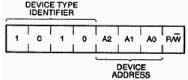
圖2 控制字節配置
3.2 寫操作 寫操作分為字節寫和頁面寫兩種操作,對于頁面寫根據芯片的一次裝載的字節不同有所不同。關于頁面寫的地址、應答和數據傳送的時序參見圖3。
圖3 頁面寫
3.3 讀操作讀操作有三種基本操作:當前地址讀、隨機讀和順序讀。圖4給出的是順序讀的時序圖。應當注意的是:最后一個讀操作的第9個時鐘周期不是“不關心”。為了結束讀操作,主機必須在第9個周期間發出停止條件或者在第9個時鐘周期內保持SDA為高電平、然后發出停止條件。
圖4 順序讀
4 實例:X24C04與MCS-51單片機軟硬件的實現X24C04是XICOR公司的CMOS 4096位串行EEPROM,內部組織成512×8位。16字節頁面寫。與MCS-51單片機接口如圖5所示。由于SDA是漏極開路輸出,且可以與任何數目的漏極開路或集電極 開路輸出“線或”(wire-Ored)連接。上拉電阻的選擇可參考X24C04的數據
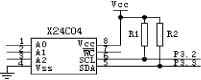
圖5 X24C04與51單片機接口
;名稱:BSENT
;描述:寫字節
;功能:寫一個字節
;調用程序:無
;輸入參數:A
;輸出參數:無
SENDA: CLR P3.2
SETB P3.2
DJNZ R2,SENDA
CLR P3.2
SETB P3.3
SETB P3.2
RET
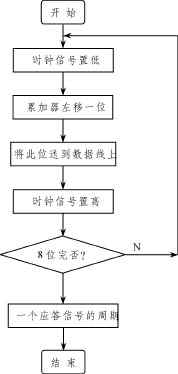
圖6 流程圖
5
1、對IIC總線的一次操作完之后,需要等待一段時間才能進行第二次操作。否則是啟動不了總線的:) 2、在時鐘線(SCL)為高電平的時候,一定不能動數據線(SDA)狀態,除非是啟動或者結束總線 |
CAN總線
現場總線是當今自動化領域技術發展的熱點之一,被譽為自動化領域的計算機局域網。它的出現為分布式控制系統實現各節點之間實時、可靠的數據通信提供了強有力的技術支持。CAN(Controller Area Network)屬于現場總線的范疇,它是一種有效支持分布式控制或實時控制的串行通信網絡。較之目前許多RS-485基于R線構建的分布式控制系統而言, 基于CAN總線的分布式控制系統在以下方面具有明顯的優越性:
首先,CAN控制器工作于多主方式,網絡中的各節點都可根據總線訪問優先權(取決于報文標識符)采用無損結構的逐位仲裁的方式競爭向總線發送數據,且CAN協議廢除了站地址編碼,而代之以對通信數據進行編碼,這可使不同的節點同時接收到相同的數據,這些特點使得CAN總線構成的網絡各節點之間的數據通信實時性強,并且容易構成冗余結構,提高系統的可靠性和系統的靈活性。而利用RS-485只能構成主從式結構系統,通信方式也只能以主站輪詢的方式進行,系統的實時性、可靠性較差;
其次,CAN總線通過CAN控制器接口芯片82C250的兩個輸出端CANH和CANL與物理總線相連,而CANH端的狀態只能是高電平或懸浮狀態,CANL端只能是低電平或懸浮狀態。這就保證不會出現象在RS-485網絡中,當系統有錯誤,出現多節點同時向總線發送數據時,導致總線呈現短路,從而損壞某些節點的現象。而且CAN節點在錯誤嚴重的情況下具有自動關閉輸出功能,以使總線上其他節點的操作不受影響,從而保證不會出現象在網絡中,因個別節點出現問題,使得總線處于“死鎖”狀態。
而且,CAN具有的完善的通信協議可由CAN控制器芯片及其接口芯片來實現,從而大大降低系統開發難度,縮短了開發周期,這些是只僅僅有電氣協議的RS-485所無法比擬的。另外,與其它現場總線比較而言,CAN總線是具有通信速率高、容易實現、且性價比高等諸多特點的一種已形成國際標準的現場總線。這些也是目前 CAN總線應用于眾多領域,具有強勁的市場競爭力的重要原因。
CAN (Controller Area Network)即控制器局域網絡,屬于工業現場總線的范疇。與一般的通信總線相比,CAN總線的數據通信具有突出的可靠性、實時性和靈活性。由于其良好的性能及獨特的設計,CAN總線越來越受到人們的重視。它在汽車領域上的應用是最廣泛的,世界上一些著名的汽車制造廠商,如BENZ(奔馳)、BMW(寶馬)、PORSCHE(保時捷)、ROLLS-ROYCE(勞斯萊斯)和JAGUAR(美洲豹)等都采用了CAN總線來實現汽車內部控制系統與各檢測和執行機構間的數據通信。同時,由于CAN總線本身的特點,其應用范圍目前已不再局限于汽車行業,而向自動控制、航空航天、航海、過程工業、機械工業、紡織機械、農用機械、機器人、數控機床、醫療器械及傳感器等領域發展。CAN已經形成國際標準,并已被公認為幾種最有前途的現場總線之一。其典型的應用協議有: SAE J1939/ISO11783、CANOpen、CANaerospace、DeviceNet、NMEA 2000等。
什么是CAN總線?
CAN意為Controller Area Network的縮寫,意為控制區域網絡。是國際上流行的現場總線中的一種。是一種特別適合于組建互連的設備網絡系統或子系統。
2. CAN總線特點?
l CAN是到目前為止為數不多的有國際標準的現場總線
l CAN通訊距離最大是10公里(設速率為5Kbps),或最大通信速率為1Mbps(設通信距離為40米)。
CAN總線上的節點數可達110個。通信介質可在雙絞線,同軸電纜,光纖中選擇。
CAN采用非破壞性的總線仲裁技術,當多個節點同時發送數據時,優先級低的節點會主動退出發送,高優先級的節點可繼續發送,節省總線仲裁時間。
CAN是多主方式工作,網上的任一節點均可在任意時刻主動地向網絡上其他節點發送信息。
CAN采用報文識別符識別網絡上的節點,從而把節點分成不同的優先級,高優先級的節點享有傳送報文的優先權。
報文是短幀結構,短的傳送時間使其受干擾概率低,CAN有很好的效驗機制,這些都保證了CAN通信的可靠性。
3. CAN總線應用領域
CAN總線最初是德國BOSCH為汽車行業的監測,控制而設計的。現已應用到鐵路、交通、國防、工程、工業機械、紡織、農用機械、數控、醫療器械機器人、樓宇、安防等方面。
I2C(Inter-Integrated Circuit)總線
I2C(Inter-Integrated Circuit)總線是一種由PHILIPS公司開發的兩線式串行總線,用于連接微控制器及其外圍設備。I2C總線產生于在80年代,最初為音頻和視頻設備開發,如今主要在服務器管理中使用,其中包括單個組件狀態的通信。例如管理員可對各個組件進行查詢,以管理系統的配置或掌握組件的功能狀態,如電源和系統風扇。可隨時監控內存、硬盤、網絡、系統溫度等多個參數,增加了系統的安全性,方便了管理。

評論