變頻器控制功能的參數選擇與典型應用

(6)加減速時間
變頻器加速時間、減速時間分別對應電機在啟動過程從0hz到最大輸出頻率所需要的時間、停止過程中從最大輸出頻率到0hz所需要的時間。如圖1(c)所示。加減速時間的大小將直接影響頻率給定躍變到實際最終輸出頻率響應時間的長短。對于諸如風機類大慣量平方特性負載,時間值的過長或過短都將容易引發變頻器在啟動、停止過程中的過壓、過流故障的發生。需要在實際調試中通過不斷的啟停操作的嘗試來尋找合理的時間設定值。另外,與加減速時間相關的參數還有加減速曲線類型選擇問題,圖1(c)中的斜線①、斜線②、斜線③是針對3種不同負載特性在加減速過程中而設置的,可參考lg公司《is5系列變頻器用戶手冊》來了解這個問題,這里不再贅述。
(7)與電機保護直接相關的參數
變頻器不僅是一個變頻、變壓裝置,更是一個電機綜合保護裝置,通常都有以下保護功能參數:輸入/輸出缺相保護、電子熱保護、熱敏保護、過載保護、過流保護、堵轉保護等。除輸入缺相保護是對進線電源因素的保護外,后5種保護都是針對電機的直接保護,區別在于熱敏保護是一種直接的電機溫度信號檢測結果的保護,而其它保護則是一種基于電機銘牌數據(包括額定功率、電流、電壓、頻率、轉速,以及定子電阻與電抗)而進行的電流熱效應計算的理論保護。電機的銘牌數據可以手動設置,在大多數主流變頻器中,也可以利用一個被稱為“自動馬達適配”(ama:auto motor adapter)的參數幫助我們自動設置電機的部分特征參數。另外,需要指出的是堵轉保護功能的使能作用,經常會導致電機啟動過程中實際加減速時間將不再嚴格按照加減速時間參數的設定值進行,通常會導致實際啟停過程的時間延長。
(8)與啟停操作和頻率給定方式相關的參數
撇開rs-485串行通訊方式,變頻器的啟停操作方式和頻率給定方式一般都各自有2種:操作面板和端子。因此,我們可以得出變頻器如表1所述的4種組合運行方式:

其中,“0”代表該方式無效,“1”代表該方式有效。它們各代表的意義是,編號0:全端子操作與頻率給定方式;編號1:端子啟停+面板頻率給定方式;編號2:面板啟停+端子頻率給定方式;編號3:全面板操作與頻率給定方式。在集中控制系統應用中以編號0方式(下文會常用到)使用的最多。
在對變頻器的主要基本參數做出介紹后,下面讓我們來介紹一下變頻器中都有哪些常用的控制方式,針對這些控制方式都應用在哪些比較典型的應用場合,以及相應需要設置哪些相關參數。
本文把以下將要介紹的開環與閉環控制方式、工藝過程控制方式、開環轉矩控制方式、速度反饋轉矩控制方式統稱為常規控制方式,而把專用變頻器或通過選件卡實現的為某個特定行業應用而 采用的控制方式稱為特殊控制方式。
3 開環與閉環速度控制方式
對變頻器控制而言,所謂開環就是變頻器的運行輸出頻率只受頻率給定值大小變化的影響,而沒有與外部反饋信號作用建立數學關系或根本就不存在外部反饋信號。可見開環控制方式在概念上是一種只顧“命令”而不顧“實際結果”的控制方式(之所以說是概念上,是因為現在有些變頻器產品,諸如通過滑差補償等參數的設定可以達到命令與結果之間有一定程度的關聯),因此,開環速度控制方式的速度精度不夠精確,對需要追求高精度速度準確性或實際速度追蹤調節的控制應用場合,就需要采用閉環速度控制方式。
需要申明的是,我們在這里講的開環與閉環都是站在變頻器設備的角度而不是控制系統角度進行判定的。比如,在我們經常看到的變頻恒壓供水系統中,那些通過數字pid儀表來設定壓力給定值和接收現場壓力變送器的實際壓力反饋信號的控制方式,若站在控制系統角度,這個系統就是閉環控制方式,但若站在變頻器角度看,在這里仍然被稱為開環控制方式,因為對變頻器而言它的運行頻率給定來自pid儀表的輸出,整個給定、反饋、調節等功能全部又pid儀表來完成的,變頻器只是被作為一個驅動執行設備在使用。
3.1 開環速度控制方式
問題1的提出
假設有這樣一個印刷業務用戶,如圖2(a)所示,希望通過變頻驅動實現對收卷過程的恒定線速度控制,具體要求如下:
(1) 啟停操作和調速都在現場操作箱上進行,并可通過電位器在控制箱上調節收卷的線速度;
(2) 收卷電機的線速度要始終與牽引電機的線速度保持一致(放卷由剎車片控制,張力由張力架調節);
(3) 限定速度調節范圍。
針對用戶的機械設備和提出的這個需求,我們將其控制驅動對象分為2個部分:牽引輥道電機驅動和收卷筒電機的驅動。
問題1的分析
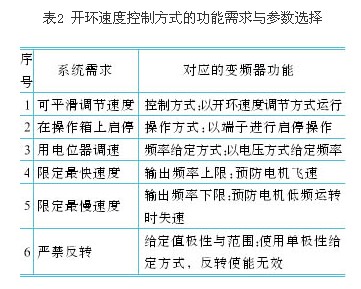
首先,讓我們看看用戶對牽引電機控制的要求,針對用戶的需求,可以把其中對牽引電機的需求收集為表2所示的具體子項,并將這些子項對應給出所需求的變頻器功能。
很顯然,按照表2中的參數,在牽引電機上只需要采用開環速度控制方式就可以滿足用戶對牽引電機變頻驅動的要求。同時,按照表2中的各項“需求對應的變頻器功能”,我們也很容易去尋找到具備這樣功能的變頻器,那么,我們也就能相當輕松地完成用戶對牽引電機的控制需求了。當然,除了表2中的需要功能外,變頻器的一些基本參數功能,諸如:電機參數、頻率參數、加減速時間參數等(如第2節內容所提到的一些基本參數),無論在什么樣的控制方式應用系統中都是必不可少需要設置的,這里不再贅述(以下類同,略)。
通過以上分析,可以得出如表2所示的分析結果。再按照表2中的歸類后的功能需求,逐個分解為對變頻器某些特定的、具體的參數的設置,這樣就可以得到如圖2(a)中的1#變頻器所示的設計結構圖了。圖2(a)中的1#變頻器采用的控制方式就是開環控制、編號0方式。
在本文中,對于常規控制方式的案例分析中,不準備將諸如表2中的對應的變頻器功能再進一步轉化為某個特定品牌的變頻器參數,以免給讀者造成品牌依賴性誤導(以下常規控制方式的案例同),只想表達一種思維過程,供讀者參考。而對于特殊應用場合的控制方式,將以具體品牌為例加以說明。
3.2 閉環速度控制方式
問題2的提出
同問題1的提出,如圖2(a),略。
問題2的分析
首先,由于用戶需要收卷電機的運行線速度與牽引電機保持一致,為達到這個目的,我們只要將牽引電機與收卷電機用同一個速度給定就可以實現這2臺電機角速度的一致(當然,也可以將牽引電機實際運行速度的輸出信號dc4~20ma或dc0~5v/10v作為收卷電機的速度給定信號,這2種方式的差異在于:前者為同步速率給定方式;而后者為主從隨動給定方式,存在一定的響應延遲,具體差異分析,略);其次,由于收卷滾筒在運行過程中,隨著紙張等物體被不斷地纏繞在滾筒上,導致滾筒的半徑在不斷地增大,如果收卷電機的角速度保持不變,那么,收卷過程中的線速度也同樣在不斷地加快,為滿足用戶對收卷過程中線速度恒定的需求,必須想辦法讓收卷電機的角速度隨滾筒半徑的增長而降低,以實現線速度恒定的目的。為此,需要一個檢測線速度的傳感器信號,以此來作為變頻器的速度反饋,告訴變頻器要做出角速度的實時調整。在本例中,我們在夾送導向輥上安裝了編碼器(不能安裝在電機軸或收卷滾筒軸上,否則,編碼器測出的信號就不是線速度反饋信號而是角速度反饋信號),以編碼器的脈沖率來表示實際線速度的快慢。如圖2(a)中所示,這樣對于2#變頻器而言,它既有一個用電位器表示的給定速度,又有一個用編碼器的脈沖來表示的實際速度反饋信號,因此,2#變頻器就應該是一個閉環速度控制方式的應用案例。
通過以上對用戶需求的分析,我們可以得出如表3所示的結果。
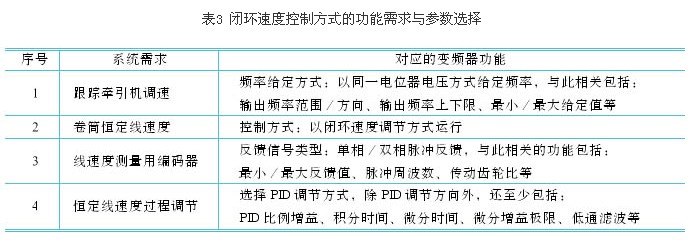
在表3中,我們略去了與閉環速度控制非直接相關的其它一些功能的列舉,在實際應用中就像對基本參數的需求一樣,同樣需要對這些功能進行選擇與相應參數的設置。

評論