基于Motionchip的直流無刷伺服電機運動控制系統設計

加氫反應器剝離成像系統的控制系統本質上是一個二維的運動控制平臺,從系統要求的性能指標來看,控制系統需要滿足如下指標:
·水平掃查速度可達6mm/s無級可調;垂直掃查速度達300mm/s無級可調;
·能夠實現粗掃查和精密掃查,對指定的區域實現精密掃查;
·系統的控制方式分為手動/自動,兩者之間可以切換;
·X軸(水平)和Y軸(垂直)2個方向上的運動誤差≤±1mm。
系統硬件設計
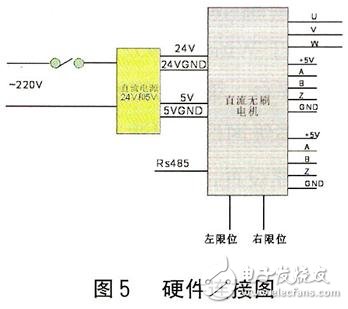
由此選擇了上述設計的運動控制系統,具有體積小,性能高,控制簡單,價格低,但是每個只能控制一個電機。若要兩臺電機協同控制,則須通過 RS485總線將其連接起來。控制系統的總體結構如圖4所示。X向電機用來控制絲杠的運動:選用EC-max32,無刷70W+減速器為行星輪減速箱(速比為23,型號為GP 32C)+碼盤(三通道500線)。Y方向電機用來控制探頭的運動,采用RE-32,有刷80W+減速器為行星輪減速箱,型號為GP42C(速比為 33)+碼盤(三通道500線)。圖5示出硬件連接圖。
系統軟件設計
控制系統的軟件是基于Vc++和MotionChip的動態鏈接庫設計的,軟件主要完成對探頭位置的運動控制,如圖6。
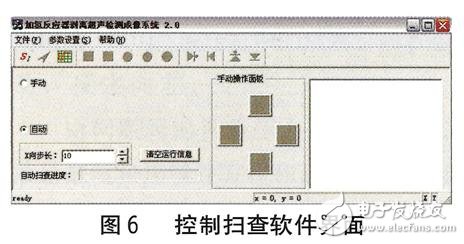
用戶操作界面功能有:
·參數設置與顯示模塊主要是設置一些系統參數(如掃查長度,探測寬度)和控制參數(如速度參數、加速度參數等);
·任何時刻,控制程序都時刻監視系統的運行狀況,隨時對系統故障做出相應的處理。
軟件部分包括X向運動和Y向的掃查運動,數據存儲及處理,手動控制,故障處理,運動狀態顯示及故障顯示等。操作界面(GUI)給予清晰、簡單的用戶界面,方便用戶調試、運行,同時能夠將伺服驅動器傳遞過來的信息顯示出來,便于監控。任務編程模塊將要實現控制任務的規劃,如X軸向和Y軸向運動等,包括故障查詢、處理。
運行效果
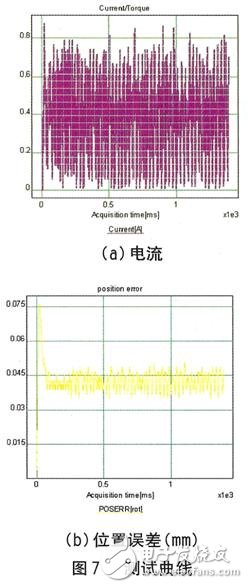
智能伺服驅動器性能的好壞直接決定整個系統設計的成敗,為此用一直流電機對驅動器進行測試,電機的電流和位置誤差如圖7(a)、(b)所示,從圖7中可以看出,驅動器的響應時間只有0.12s,位置誤差很小。通過對通訊速度及上位機控制命令的測試顯示,在實時性要求不是非常嚴格的情況下,以RS232串口或者485串口的通訊速率是完全可以滿足系統需求的。
結語
本文基于一類新穎的專用伺服控制芯片Motionchip,進行了伺服控制器設計和實踐研究,并設計了一個功能較為完善的直流無刷伺服驅動器的原型。將該控制器運用到加氫反應器超聲檢測成像系統中對二維的運動進行控制,保證了整個系統取得良好的性能。Motionchip這種多功能專用的運動控制芯片不僅簡化了整個系統的設計過程,而且具有很好的開放性和網絡性,對中小型項目是非常理想的設計方案。

評論