多通道高帶寬同步采集系統

2)觸發信號偏斜和抖動
為了使每臺示波器在同一時刻采集數據,必須同時觸發,需要一個共同的觸發信號通過電纜、探頭或者其他電路網絡輸入到各臺示波器。觸發信號傳播網絡的延遲差異顯然會導致觸發信號到達各示波器的時刻有偏斜,如圖7虛線所示路徑。而且每臺示波器的觸發電路都有觸發抖動(Trigger jitter)。單臺示波器的4個通道由一個觸發電路控制,即使觸發抖動再大,4通道之間沒有相對觸發抖動。但多臺示波器就有多個觸發電路,各觸發電路的抖動又不相關。考慮一個最壞情況,在一次采集中,一臺示波器的觸發抖動是1ps,另外一臺可能是-1ps,那么這兩臺示波器通道之間因為觸發抖動產生的時序偏斜就有2ps。
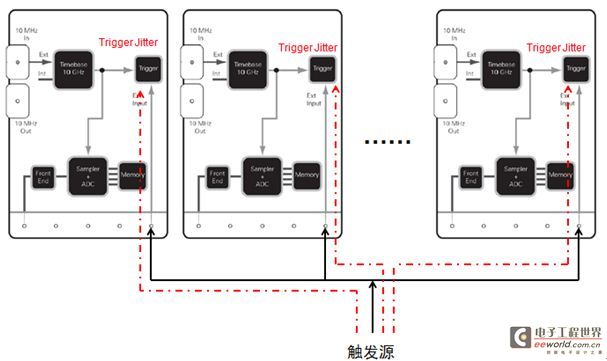
圖7多臺示波器觸發信號的偏斜
3)信號通道偏斜
信號從進入示波器輸入接口,經過前端模擬電路,到達ADC,這一段行程需要一定傳播時間,一臺示波器各個通道的信號傳播時間不可能完全一致,多少有一些差異,一般較小。但不同示波器之間的通道偏斜可能很大。
以上影響同步精度的因素,有的是靜態誤差,有的是動態誤差,總結如下:

靜態誤差一般可以通過校準方式來消除,而動態誤差難以消除。對于單臺示波器,時鐘抖動可以控制得比較小,觸發抖動也可以不計,但在多臺示波器同步方式下,時基時鐘的抖動將顯著提高,觸發抖動也不能忽略。
試驗4臺某品牌示波器組成的20GHz帶寬、16通道同步采集系統,經過校準后,在任意兩個通道輸入同相、高信噪比、低抖動的6GHz正弦信號,測量其相位差。多次測量的標準偏差超過9度,相當于兩通道之間時序抖動的有效值為4.17ps。在某些應用中,采集系統引入此程度的誤差已經不能接受。
與多個單臺示波器不同,LabMaster由一個主控模塊和若干采集模塊構成,每個采集模塊可提供4個采集通道。如下圖,是1個主控模塊和5個采集模塊配置在一起組成的20通道采集系統。主控模塊通過兩套電纜與各個采集模塊相連。一個是時鐘分配網絡(圖中的ChannelSync),一個是數據和控制網絡。
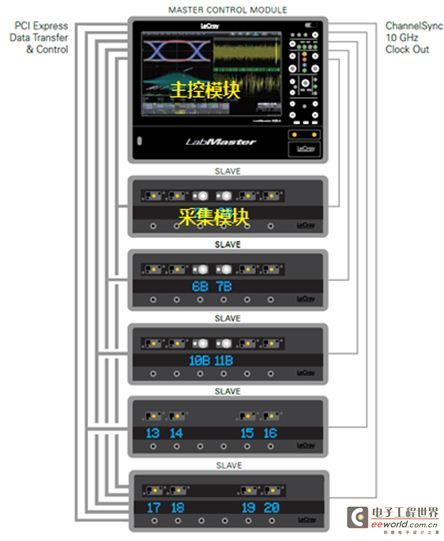
圖 8 LabMaster結構圖
LabMaster時基和觸發電路的結構如圖 9,它具備兩個重要的特點:
1)每個采樣模塊的參考時鐘來源于主控模塊。一個專門的時鐘分布網絡ChannelSync,直接把10GHz時基時鐘分配到每個采集模塊,整個系統只有一個時基電路。ChannelSync采用了高穩相電纜,對信號的保真度高。并且由于時基時鐘頻率高、擺率大,受幅度噪聲的影響小。
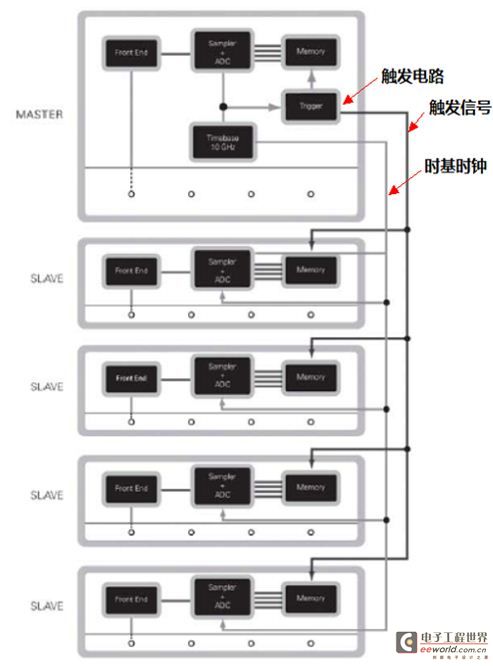
圖 9 LabMaster時基和觸發結構
2)所有模塊的每個通道都由主模塊的觸發電路控制,即使這個觸發電路有觸發抖動,也不影響通道之間的相對時序關系。
從上述結構特點可以看出,LabMaster本質上就是一個單臺示波器,避免了多臺示波器同步方式的種種弊端。用這套示波器系統按前述同樣的方法來評估,通道之間相位差的標準偏差只有1.1度,相當于509fs的時序抖動,同步精度大大優于多臺示波器同步方式。
三.結束語
搭建多臺示波器實現的多通道采集系統,實際是一個測試系統的集成,除了需要配置參考時鐘源、時鐘分配網絡、觸發信號分配網絡以外,往往需要一臺計算機對每個示波器進行程控。更復雜的是,需要一個校準系統來完成前文提到的靜態誤差的消除。這個系統的集成過程不僅復雜,使用也很繁瑣。而LabMaster本質就一個單臺儀器,無需額外的系統集成就可以使用,并且自帶校準源,可以很方便地進行校準。
因此對于需要多通道、高帶寬、高采樣率、高同步精度的應用場合,LabMaster無疑是目前業界唯一的選擇。
參考文獻
[1] ChannelSync White Paper. LeCroy Corporation.
[2] LabMaster 9 Zi-A Oscilloscope Getting Started Manual. LeCroy Corporation.

評論