海洋環(huán)境地磁場三分量測量儀的設計與實現(xiàn)

處理器選擇ST公司的基于ARM的低功耗高性能32位微控制器,采用2個陀螺儀,一個6軸地磁模塊,壓力傳感器和溫度傳感器,將系統(tǒng)安裝于艦船桅桿上,接外部電源。當艦船在海上實地測量時,隨著艦船姿態(tài)的改變,陀螺儀實時檢測到姿態(tài)角的信息,同時艦船所在坐標點的三分量磁場被地磁模塊實時檢測到,信息經(jīng)過處理器,最終可以得到該坐標點處的實際地磁場信息。
3.3系統(tǒng)軟件架構(gòu)
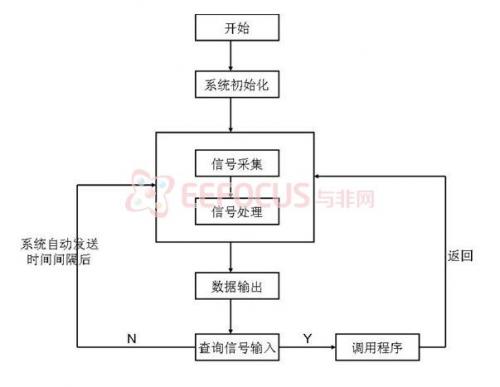
軟件架構(gòu)圖
上圖即為軟件構(gòu)架圖。首先要進行系統(tǒng)的初始化,在每次斷電后重新啟動或者復位后進行。傳感器模塊感知外部信息量,其中對陀螺儀檢測到的信號還要進行模數(shù)轉(zhuǎn)換,隨之將采集到的兩組數(shù)據(jù)存儲于處理器內(nèi),根據(jù)數(shù)學模型進行實時分析處理。最后將各感知的初始信號與經(jīng)過處理之后的結(jié)果串口輸出。
3.4 系統(tǒng)軟件流程
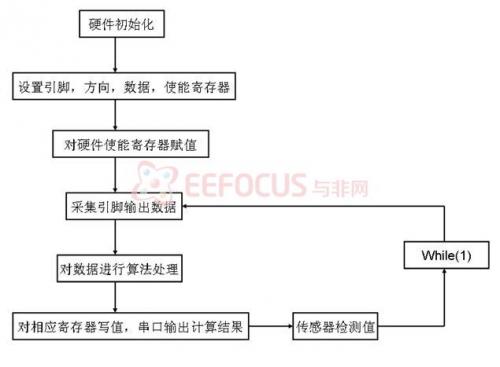
程序運行流程圖
由于數(shù)據(jù)處理是不間斷工作的,因此在一次數(shù)據(jù)處理完成并且輸出之后,程序再次運行至采集引腳輸出數(shù)據(jù),進行第2次計算。上圖為程序運行流程圖。

評論