基于DSP 和CPLD 的三電平逆變器SVPWM 算法的實現

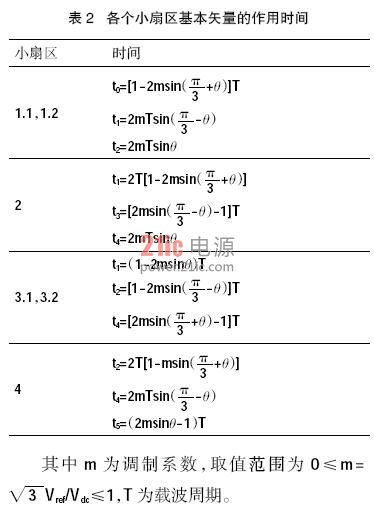
1.2.2 計算基本矢量的作用時間
取合成空間電壓矢量所在小扇區三角形的三個頂點的基本電壓矢量為組成空間電壓矢量的基本合成矢量,根據合成空間電壓矢量的伏秒平衡原則,得到各個小扇區的作用時間如表2 所列[5]。
1.2.3 選擇合適的開關作用順序
開關作用順序應滿足兩個原則:一是每次只有一相的一個開關狀態發生變化;再就是每相的開關狀態變化不允許有狀態Sa=1 和狀態Sa=-1 之間的直接跳變,這樣就能達到開關損耗最小,且輸出電壓諧波小的特點。本文采用七段法來合成每個空間電壓矢量,根據開關作用順序的原則,在每個小扇區內均使用正小矢量作為初始矢量。比如,假設空間矢量處于圖3 所示的1.1 區,則可以選擇開關作用的順序為(100)—(000)—(00-1)—(0-1-1)—(00-1)—(000)—(100),其它扇區的開關順序選擇類似。
2 SVPWM調制算法的DSP和CPLD實現
三電平逆變器需要12 路PWM 信號,采用TI公司的DSP TMS320F2812 雖可以產生12 路PWM信號,但DSP既要完成SVPWM算法的扇區判斷、作用時間計算及PWM 脈沖的發生,又要完成與液晶的通信,與用戶接口的數字控制等,將使程序顯得復雜和混亂,并且DSP 兩個事件管理器不能做到完全同步,從而造成逆變器同相驅動信號的不同步,將對逆變器的性能造成影響,僅有的12 路PWM 信號同樣不能滿足以后擴展更多電平逆變器的控制的需要。本文采用DSP和CPLD共同作用實現三電平逆變器的SVPWM 算法,使SVPWM算法的實現變得簡單方便。圖4 是整個控制系統的控制框圖。
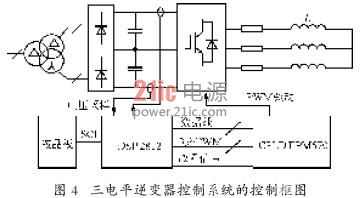
如圖4所示,利用DSP具有運算處理能力強,外設模塊多等特點,由DSP主程序完成程序初始化、與上位機的液晶通信,用戶IO 接口的數字控制等,采用定時器下溢中斷完成逆變器直流電壓的AD采樣處理、空間矢量所在扇區的判斷、組成參考矢量的基本矢量作用時間的計算,將3 個基本矢量的作用時間的1/2 賦給DSP 的EVA 的3個比較寄存器,與定時器產生的三角載波相比較,產生6 路PWM 信號,取其相互獨立的3 路PWM1,PWM3,PWM5 連接到CPLD。CPLD 采用ALTERA公司的EPM570T144C4,利用CPLD的邏輯處理能力強,IO 口多等特點完成逆變器12 路PWM 波形的發出。CPLD通過數據線接收DSP判斷出的空間矢量所在的大小扇區號,并捕捉DSP的3 路獨立的PWM1,PWM3,PWM5 信號,根據所在的扇區號和3 路獨立的PWM 信號的信息進行譯碼,產生七段式的12 路PWM 驅動信號。
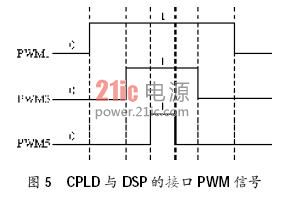
設一個載波周期內DSP 產生獨立的PWM1,PWM3,PWM5 的波形如圖5 所示,則CPLD 捕捉這3路PWM信號的上升沿和下降沿并進行計數,設計數值為count,每個載波周期的計數初值count=0,當捕捉到PWM1 的上升沿時,計數值加1,同樣類似,最后計數值count=6,在載波周期的下溢中斷發生時,CPLD 通過數據線得到DSP 計算出來的扇區號,這樣CPLD 根據扇區號和計數值count 的值,根據開關作用順序規則進行譯碼,產生12 路PWM信號驅動逆變器的12個開關管。同時驅動板上的過流信號連接到CPLD,由CPLD完成對過流信號的處理,當發生過流時,封鎖PWM脈沖起到保護系統的作用,同時將故障信號傳送給DSP,使DSP得到當前的運行狀態并傳送到液晶板上顯示。并且以后要擴展更多電平逆變器的控制時,只需要擴展數據線的位數即可,因此該方案簡單方便,易于向更多電平的擴展。
3 實驗結果和結論
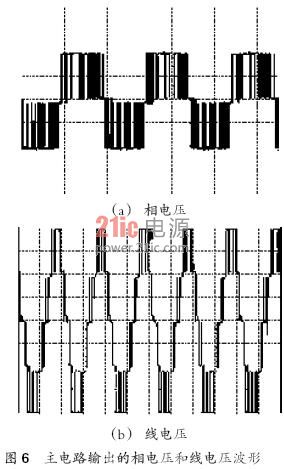
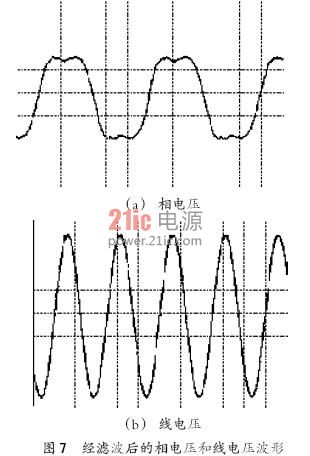
根據本文所采用的NPC三電平逆變器,搭建小功率實驗平臺,對所提出SVPWM 調制算法的實現方法進行驗證。圖6 是主電路輸出的相電壓和線電壓波形,圖7是經RC 濾波后的輸出相電壓和線電壓波形。實驗結果驗證了所提出NPC三電平逆變器SVPWM 控制算法的實現方法的可行性和正確性。
利用DSP的運算能力強,集成外設多的特點,完成控制算法中扇區判定,基本矢量作用時間的計算,與液晶板的通信等功能,利用CPLD 的邏輯運算能力強,易于IO口擴展的特點完成PWM 驅動波形的產生。所提出的實現方案結構簡單,便于向更多電平的擴展,對NPC三電平逆變器的具體實現具有一定的參考價值。










評論