一種基于PCC 的水電站計算機監控系統設計

2 現地控制單元程序設計
2.1 控制程序設計
2.1.1 任務層設計
PCC 的操作系統是一個分時多任務操作系統,該系統可使控制系統得以優化,擁有更好的穩定性和實時性。在控制程序中,各個任務程序模塊依據其自身的重要性、實時性要求, 分別位于優先級不同的任務層下,完成不同的功能。例如,事故故障處理直接影響水輪機組的安全運行, 因此, 該模塊被置于任務層Cyclic #1 中; 而對實時性要求相對不高的模塊如通信程序模塊,則被置于任務層Cyclic # 4中。
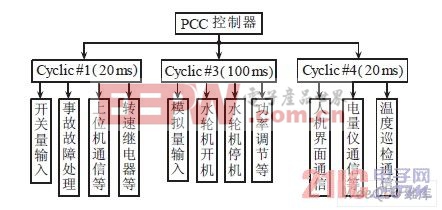
圖2 為控制程序各個任務程序模塊的任務層分布(括號內時間分別表示不同任務層的循環時間)
2.1.2 模擬量處理程序設計
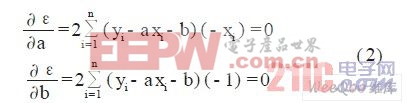
機組模擬量如壓力、溫度等對整個水輪機組的正常運行起著至關重要的作用,因此需要對模擬量進行濾波以保證數據的準確性。以PLC 為核心的控制系統對模擬量值的濾波一般是通過將模/ 數轉換器得到的數值進行平均N 次得以實現,存在著可靠性差等缺點。該程序則基于最小二乘法對模擬量數據進行擬合處理, 并可根據傳感器特性的變化調整參數, 提高了數據的可靠性。最小二乘法即:選擇適當的a, b, 使式( 1) 中的ε最小。

因為ε是a, b 的函數, 用求極值的方法可知應滿足:






評論