新一代薄膜壓力傳感,重塑機器人觸覺未來

由深圳市人民政府主辦的第二十七屆高交會于2025年11月14日-16日在深圳舉行。作為高交會的重要論壇“中國高新技術論壇”于11月14日舉辦,論壇主題為:人工智能賦能未來產業發展”。悟通感控創始人兼CEO陳立洋首先解釋了觸覺傳感器到底是什么?他表示,在人類進化中,感知、學習、思考、行動構成了智能演化的核心循環。而當下機器人技術里,執行層面已有諸多突破,觸覺感知環節卻相對滯后——這正是機器人難以實現我們美好愿景的關鍵短板。對人類而言,握筆、抓取雞蛋、鼠標或香蕉這類簡單動作,對機器人來說卻極具挑戰。

陳立洋指出,觸覺傳感器的核心使命,是賦予機器人靈巧手精準抓握的能力;而悟通感控要攻克的,是傳感器“可裝配、裝配后穩定可靠”的關鍵難題。“我們真正需要的,是具備高柔性、高靈敏度、高穩定性的薄膜傳感器——這正是悟通投身薄膜傳感器研發的初心。”
此外,他提到,研究顯示,目前全球機器人觸覺傳感器賽道仍處于發展初期,而國內在該領域的技術實力已領先國際。未來,精細觸覺操控需求將在更多場景延伸,預計2029年全球市場規模將達4.3億美元——在我們看來,這一預測或許還較為保守。
以下為演講實錄:
各位下午好!非常榮幸能和大家分享“新一代薄膜壓力傳感器技術在機器人力觸覺反饋中的應用”這一主題。

觸覺傳感器的發展歷程不算漫長,卻直接決定了機器人技術的突破高度。先和大家明確核心問題:觸覺傳感器到底是什么?人類進化中,感知、學習、思考、行動構成了智能演化的核心循環。而當下機器人技術里,執行層面已有諸多突破,觸覺感知環節卻相對滯后——這正是機器人難以實現我們美好愿景的關鍵短板。對人類而言,握筆、抓取雞蛋、鼠標或香蕉這類簡單動作,對機器人來說卻極具挑戰。李飛飛曾提出“空間智能感知”的核心觀點:在AI領域,如果缺失智能感知,AI會與物理世界脫節。對于機器人來說,也有同樣的困擾。

觸覺傳感器的核心使命,是賦予機器人靈巧手精準抓握的能力;而悟通感控要攻克的,是傳感器“可裝配、裝配后穩定可靠”的關鍵難題。傳統工業傳感器雖性能成熟,但剛性強、體積大的特性,與靈巧手的精細操作需求嚴重不匹配。我們真正需要的,是具備高柔性、高靈敏度、高穩定性的薄膜傳感器——這正是悟通投身薄膜傳感器研發的初心。
中金公司研究顯示,目前全球機器人觸覺傳感器賽道仍處于發展初期,而我們觀察到,國內在該領域的技術實力已領先國際。未來,精細觸覺操控需求將在更多場景延伸,預計2029年全球市場規模將達4.3億美元——在我們看來,這一預測或許還較為保守。
核心技術路線:薄膜傳感成產業化關鍵方向
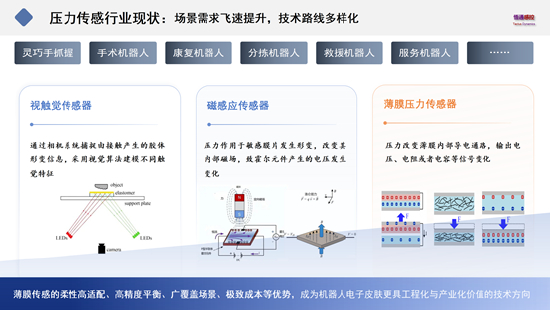
接下來,和大家分享關于觸覺傳感器的核心技術路線。悟通采用的是第四代離電勢柔性壓敏材料。現在有手術、康復、分揀等諸多場景,對抓握有非常精細的要求。目前主流的有三類:一是視觸覺傳感器,它是通過捕捉彈性體的形變來構建觸覺的特征;二是磁感應傳感器,在磁鐵靠近半導體時會產生電壓變化;三是薄膜壓力傳感器,通過壓力改變內部的導電特性,從而改變它輸出的電壓或者電阻、電容,從光學復雜度和性能上限角度,薄膜具備比較高的柔性,精度平衡的優點,適用場景更廣泛。更重要的是,它可通過卷對卷工藝加工,具備顯著成本優勢。我們堅信,薄膜傳感將成為機器人電子皮膚領域,最具工程化與產業化價值的技術方向。悟通采用的是第四代離電勢柔性壓敏材料。抓握場景,現在有手術、康復、分揀等,對抓握有非常精細的要求。目前主流的有三類:一是視觸覺傳感器,它是通過捕捉彈性體的形變來構建觸覺的特征;二是磁感應傳感器,在磁鐵靠近半導體時會產生電壓變化;三是薄膜壓力傳感器,通過壓力改變內部的導電特性,從而改變它輸出的電壓或者電阻、電容,從光學復雜度和性能上限角度,薄膜具備比較高的柔性,精度平衡的優點,適用場景更廣泛。更重要的是,它可通過卷對卷工藝加工,具備顯著成本優勢。我們堅信,薄膜傳感將成為機器人電子皮膚領域,最具工程化與產業化價值的技術方向。
技術難點突破:從材料迭代到性能革新
薄膜壓力傳感器存在諸多核心難點:一是量程與靈敏度的平衡,二者往往難以兼顧,薄膜因厚度限制,這一矛盾更突出;二是穩定性問題,包括蠕變、滿量程穩定性及溫飄,直接影響靈巧手持續抓握與反復抓握的可靠性;三是響應時間、精度與準確度的優化;最后是量產的批次一致性與壽命,這直接決定成本能否可控。
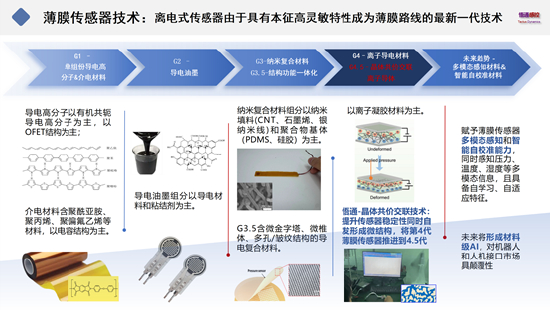
這些難點的突破,核心在于材料技術的迭代。2000年前后,導電高分子的出現讓“塑料導電”成為現實,這一突破獲得當年諾貝爾化學獎。自此,薄膜在傳感器領域的應用潛力被廣泛關注。這一階段的第一代材料(含部分介電材料),因合成工藝復雜難以產業化;隨后的導電油墨雖驗證了柔性傳感概念,卻存在靈敏度與穩定性不足的問題;納米復合材料解決了穩定性難題,卻未能提升靈敏度;微結構設計雖拉高靈敏度,卻因微納加工工藝推高成本。
直到第三代離子材料的出現,其內部自由移動的陰陽離子可在電極形成納米級雙電層電容,徹底解決了靈敏度問題。而悟通通過晶體共價交聯離子導體技術,進一步攻克了穩定性難題,我們將原本“面接觸”的材料重構為“彈簧式”結構,同時實現微結構自發形成,無需昂貴光刻模板。這讓我們從第四代技術邁向4.5代,我們相信,這兩大技術突破將帶來材料層面的顛覆性變革。
產品布局:覆蓋多場景的全棧感知方案
評估薄膜傳感器,我們內部有兩個維度。
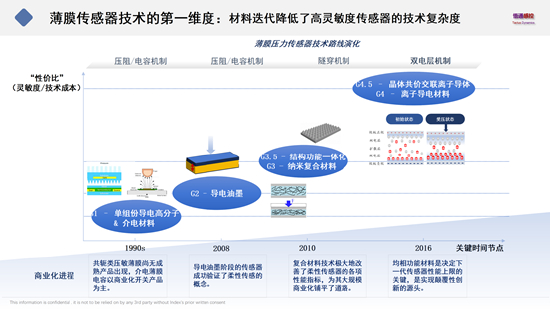
第一個維度是性價比,性價比不是傳統的成本性能,我們評估的是靈敏度和技術成本,要實現相對應的靈敏度指標要付出的技術挑戰有多大。第一代,單組分的導電高分子并沒有成熟的商業化產品出現,介電膜主要是開關電容;薄膜壓力傳感器是從導電油墨開始的,真正成功驗證了柔性傳感的概念,但導電油墨的結構很難通過技術提升靈敏度,所以這一代的性價比并不高,只是拿它做一個初步驗證或者教學上用一下,商業上很難使用。依托深厚的技術儲備,我們已開發出一系列高靈敏、低蠕變、耐久可靠的產品:
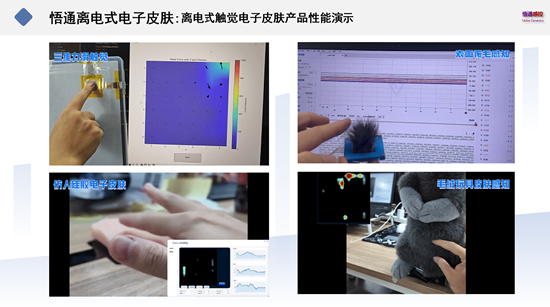
離電式電子皮膚:三維力滑觸覺款兼具柔性與切向力感知,硅膠封裝設計酷似人類皮膚;
表面覆膜傳感器:可嵌入毛絨玩具,在“可愛經濟”中注入陪伴價值,賦予產品“溫度”;
靈巧手感知元件:已推進至中試規模,與頭部廠商合作的智能反饋靈巧手,能實現微小力響應、三維力感知及低漂移穩定抓握;(現場演示):左上角可以對一個特別微小的抓握力有非常靈敏的響應。右上角是一個三維力感知,在抓握過程中不光有Z方向的感知,平面X、Y上也有響應。左下角是我們做的水平方向的靈敏感知,它在抓握物體的過程中傳感器信號基本不動,穩定性非常好。如果傳感器信號一飄,可能本來夾得很好,一下就掉地上了。右下角是垂直方向的靈敏度感知傳感器。
接近覺傳感器:技術儲備階段,可實現接觸前姿態調整,未來有望成為靈巧手標配;
智能手套:捕捉人類抓握姿態與力反饋,構建數據庫反哺靈巧手,實現泛化操作。
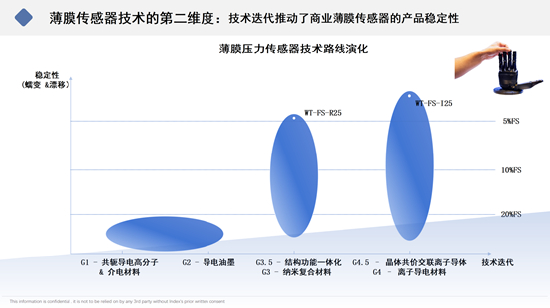
第二個維度是穩定性,多功能是錦上添花,但是產品若不夠穩定,很難持續進行商業化推進。評判穩定性的兩個核心指標是蠕變、漂移。

蠕變是給一個持續壓力,看傳感器信號長期穩定性。(現場演示):左上角的圖反映了高蠕變的現象,給一個恒定的力,信號在持續的漂。我們把這個傳感器比喻成一臺秤,本來上去時是80斤,站了兩分鐘后飆到100斤,這是傳感器發生蠕變的現象。我們開發的是低蠕變的傳感器,給一個恒定壓力后,數據曲線始終平穩;
漂移是反復受壓的性能穩定性,如持續抓握、反復抓握。目前在行業內,導電油墨的蠕變和漂移一般在20%以上,納米復合材料10~20%之間,少數幾家能夠做到5%。離電這條技術路線跟第三代技術路線在穩定性上非常類似,首先走離電式技術路線的企業并不多,其次新的技術被蠕變、漂移等壁壘制約,普遍在10~20%之間。
悟通的離電式傳感器已將這一數值控制在5%以內,部分帶量產的產品能夠做到低至2%。我國高端傳感器領域發展較晚,更多關注的是靈敏度、量程、響應時間,在穩定性和蠕變上關注不足。為此,我們牽頭編寫了薄膜壓力傳感器穩定性與抗蠕變的行業標準,同時也在深度參與多項薄膜相關行業標準制定,推動行業規范化發展。
多元場景驗證:儲能與醫療領域的實戰突破
除機器人觸覺領域,悟通還布局了儲能、醫療兩大核心業務板塊,用嚴苛場景驗證傳感器性能:

儲能領域:首次將力學參量引入電池管理系統,通過壓力信號實現鋰離子電池安全預警,較傳統方式提前30-50分鐘,已通過電池模組3000牛初始預緊力下蠕變、漂移、電磁干擾等復雜工況下的技術性能指標驗證;
醫療領域:數字化關節平衡感測儀通過離電傳感器量化膝關節手術中的力變化,為醫生提供直觀數據參考,解決了傳統手術依賴主觀經驗的痛點,大幅提升手術成功率與術后效果。相較于國外同類競品,性能領先一代,終端價格降低75%。
悟通是一家深度融合前沿材料、傳感制備與下游產業應用的全棧感知技術企業。我們并非對現有產品做二次迭代,而是從材料研發、封裝工藝到下游應用,構建了全鏈條自主研發與商業化能力。

自2023年8月成立以來,悟通已實現快速成長,獲得多項機器人、醫療行業榮譽,客戶覆蓋機器人標桿企業、新能源國央企、車企、醫械上市公司以及科研院所等數十家機構。希望今天的分享能給各位企業家帶來新的啟發,也期待未來能有機會為大家提供服務。謝謝大家!



評論