多傳感器模糊—概率交互作用的數據關聯算法


最后,由重心去模糊算法得出關聯度
![]()
其中![]() j是μBj(Z)達最大值的點.
j是μBj(Z)達最大值的點.
模糊系統的學習算法有多種[6],但它們都是基于半模糊模型,即前提的模糊隸屬函數為單值.單值模糊產生方法不適合含有噪聲的情況.作者在文獻[5]中采用了一種基于最陡下降法的全模糊模型學習算法,可用于受噪聲影響的模糊關聯系統的學習.
五、仿真舉例
1.航跡模型
該機動目標的航跡由三個不同的運動段組成.第一段為勻速運動段,沿X軸方向,起始于點x=0,y=5km,vx=0.5km/s,vy=0,持續1~50秒.第二階段為加速轉彎段,加速度為ay=5g,ax=0,持續51~70秒.第三階段為勻速運動段,沿Y軸方向,vy=0.5km/s,vx=0,持續71~100秒.假設每個采樣點上,有效雜波回波數為2個.采樣間隔T=1s.
2.性能檢驗與比較
首先,考慮用PDAF和多模型方法共同作用的情況.圖1給出了所得到的跟蹤結果.可見,當機動發生時,由于密集雜波的干擾,造成關聯錯誤,導致目標丟失.圖2,3分別給出了上述情況時,各有效回波源于目標的概率.可見,當機動發生時,真實目標回波的概率趨于零.而雜波的概率卻趨于1.
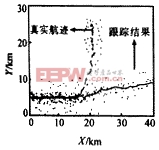
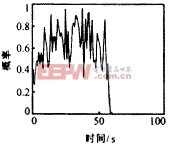
圖1 用PDAF得出的跟蹤結果 | 圖2 真實目標回波的關聯概率 |
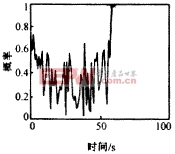
圖3 雜波回波的關聯概率 其次,考慮用本文提出的模糊邏輯和概率交互作用的數據關聯方法與多模型方法共同作用的情況.經Monte Carlo仿真,得如下結果.圖4給出了跟蹤結果.可見,較好地實現了對該機動目標的跟蹤.圖5,6分別給出了上述情況時,各有效回波的加權系數.可見,真實目標回波的加權系數明顯大于雜波的權系數.最后,考慮分別使用多傳感器和單傳感器時,目標狀態估計精度上的差異.圖7給出了上述兩種情況時的目標位置估計的均方誤差.可見,多傳感器的估計精度明顯好于單傳感器時的估計精度,尤其是在機動發生處. |
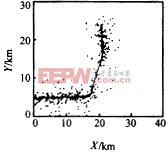
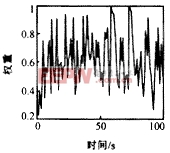
圖4 用本文算法得出的跟蹤結果 | 圖5 真實目標回波的加權系數 |
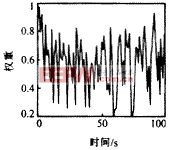
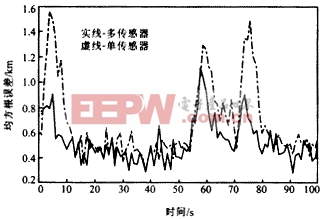
圖6 雜波回波的加權系數 |

相關推薦
技術專區 |

評論