紅外接近感測:搭建模塊,機械考量以及設計折中

大多數光源發出的光都包含可見光和紅外光譜成分。不同的光源可以有近似的以流明衡量的可見光強度,但是紅外光譜的響應相差會很大。在測量光強時,必須考慮到光的頻譜特性和光學傳感器的頻譜敏感度的差異。采用CMOS工藝的光傳感器能探測到大多數紅外輻射(峰值敏感度為880nm),因此會誤報真實的環境(可見的)狀況。
對于燈泡之類的光源,傳感器信號要比人眼看到的數量多得多。由這類傳感器控制的照明方案的響應可能與環境光譜不符,從而限制了最大接近感測距離。要建立更合適的減光或照明控制,作為接近感測系統解決方案的一部分,一顆能模仿人眼對最大紅外信號反應的傳感器是必不可少的。圖6顯示了一個光學傳感器的光譜響應,非常適合環境光感測。該圖還顯示了在接近感測中所使用的紅外波長的光譜。
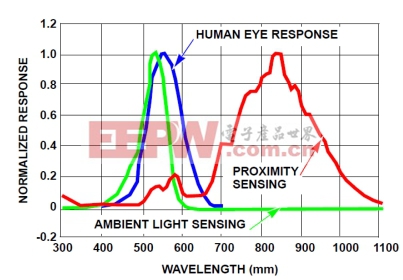
圖6,傳感器的接近感測和傳感器的環境光響應光譜。

評論