基于ARM與MEMS的AHRS設計


四元數姿態矩陣微分方程只要解4個微分方程,比方向余弦姿態矩陣微分方程減少了大量的運算,便于微處理器的編程實現。
2.1 時間更新
系統的狀態方程如式(5)所示。
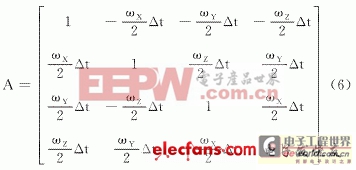
其中狀態變量為四元數X=[q0,q1,q2,q3]T,Wk-1為四維過程噪聲。矩陣A可以根據陀螺儀測得的三軸角速率[ωX,ωY,ωZ]T得到,如式(6)所示。其中Δt為兩次時間預測更新所流逝的時間。
狀態變量的時間更新如式(7)所示。
協方差矩陣P預測如式(8)所示,式中Q為四維過程激勵噪聲協方差。
2.2 觀測更新
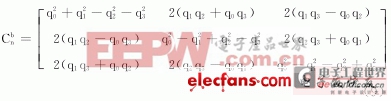
AHRS的觀測更新是通過本體坐標系上的重力加速度和地磁場的參考矢量旋轉至導航坐標系上,再與加速度和磁場傳感器比較,得到觀測變量的殘余。由本體系轉換至導航系的轉移矩陣由四元數可以表示為式(9)。
三維參考向量v轉移至導航系中可由觀測方程式(10)表示。
當重力加速度觀測更新時參考向量v等于重力加速度參考矢量(可設置為當平臺靜止水平放置時,加速度計測量得到的三維矢量為:
當磁場觀測更新時v等于磁場參考矢量(可設置為當平臺靜止水平放置且航向指向正北時,磁阻計測量得到的三維矢量為:
H是h對X求偏導的雅可比矩陣,如式(11)所示。









評論