控制系統的時域分析法--控制系統的穩態誤差

務請注意,使用拉普拉斯變換終值定理計算穩態誤差終值的條件是:sEr(s)在s平面右半部及虛軸上除了坐標原點是孤立奇點外必需解析,亦即sEr(s)的全部極點除坐標原點外應全部分布在s平面的左半部。例如給定輸入為正弦函數時
 |
其象函數
 |
在s平面的全部虛軸上不解析,就不能使用終值定理去求取系統的穩態誤差終值。
3.2.4 動態誤差
靜態誤差系數的一個明顯特點,是對于一個給定系統只有一個系數呈現有限值,其它的系數不是零就是無窮大。因而,通過靜態誤差系數求得的靜態誤差或是零,或是有限的非零值,或是無窮大。所以,誤差隨時間的變化規律不能運用這種系數求出。但有些時候人們關心的往往是誤差隨時間變化的情況,這種誤差表現了誤差隨時間變化的規律,稱之為動態誤差。本節介紹的動態誤差將提供一些關于誤差怎樣隨時間變化的信息,即,系統在給定的輸入作用下穩態誤差是否會與t,t2等成比例地增加。
動態誤差不同但穩態誤差系數相同的系統 首先論證兩個具有不同動態誤差的系統卻能夠有相同的靜態誤差系數。設以下的兩個系統:
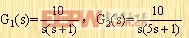 |
其靜態誤差系數由下列各式給出:
Kp1=∞, Kp2=∞
Kv1=10, Kv2=10
Ka1=0, Ka2=0
于是,對于同樣的階躍輸入,兩個系統有相同的穩態誤差。當然,對于斜坡和拋物線輸入的穩態誤差,該結論也同樣適用。這個分析表明,不能根據靜態誤差系數去估算系統的動態誤差。
動態誤差系數 現在引進動態誤差系數來描述動態誤差。通過用E(s)/R(s)的分母多項式除它的分子多項式的方法,把E(s)/R(s)展開成下列s的升冪級數:
 |
冪級數的系數K1、K2、K3、…被定義為動態誤差系數。對N型系統的動態誤差系數由下式給出:
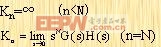 |
其中
K1=動態位置誤差系數;
K2=動態速度誤差系數;
K3=動態加速度誤差系數。
需要說明的是,在一個給定系統中,動態誤差系數是與靜態誤差系數有關的。例如:設下列具有單位反饋的0型系統:
 |
其靜態位置誤差系數、靜態速度誤差系數和靜態加速度誤差系數分別是
其中
Kp=K
Kv=0
Ka=0
由于E(s)/R(s)可展開成
 |
所以,依據靜態誤差系數給出的動態誤差系數如下:
k1=1+K=1+Kp
動態速度誤差系數由下式給出:
 |
當E(s)寫成下面的形式時:
E(s)= R(s)+ sR(s)+ s2R(s)+…
動態誤差系數的優點就更為清楚。這個級數的收斂域是s=0的鄰域,這相當于在時域內的t=∞。假定所有的初始條件為零,并且忽略掉在t=0的鄰域,這相當于在時域內的t=∞。假定所有的初始條件為零,并且忽略掉在t=0時的脈沖,則對應的時間解(即穩態誤差)由下式求出:
 |
這樣,由輸入函數和它的導數所引起的穩態誤差能根據動態誤差系數求出,這便是動態誤差系數的一個優點。
如果E(s)/R(s)圍繞原點展開成一個冪級數,級數的逐項系數就表示系統在緩慢變化的輸入作用下的動態誤差。動態誤差系數是計算任意輸入作用下的誤差信號和穩態誤差的簡便方法。用這個方法就不需要實際去解系統的微分方程。
例3-9
設前向傳遞函數為G(s)= ![]() 的單位反饋控制系統,求出它的動態誤差系數。還要求出當輸入量為r(t)=a0+a1t+a2t2時的穩態誤差。
的單位反饋控制系統,求出它的動態誤差系數。還要求出當輸入量為r(t)=a0+a1t+a2t2時的穩態誤差。
對于該系統 ![]() =
= ![]() =0.1s+0.09s2-0.019s3+…
=0.1s+0.09s2-0.019s3+…
即 ![]() =0.1
=0.1 ![]() (t)+0.09
(t)+0.09 ![]() (t)-0.019
(t)-0.019 ![]() (t)+…
(t)+…
則動態誤差系數是 k1=∞
k2=1/0.1=10
k3=1/0.09=11.1
由于r(t)由下式給出:r(t)=a0+a1t+a2t2
得![]() (t)=a1+a2t,
(t)=a1+a2t,![]() (t)=2a2,
(t)=2a2,![]() (t)=0
(t)=0
于是,穩態誤差為
![]() =
= ![]() [0.1(a1+a2t)+0.09(2a2)]=
[0.1(a1+a2t)+0.09(2a2)]= ![]() (0.1a1+0.18a2+0.2a2t)
(0.1a1+0.18a2+0.2a2t)
只要不是a2=0,穩態誤差就變為無窮大。
由以上分析可知,如果E(s)/R(s)圍繞原點展開成一個冪級數,級數的逐項系數就表示系統在緩慢變化的輸入作用下的動態誤差。動態誤差系數是計算任意輸入作用下的誤差信號和穩態誤差的簡便方法。用這個方法就不需要實際去解系統的微分方程。














評論