一種尋跡小車中分布式控制系統的設計與應用

系統通信
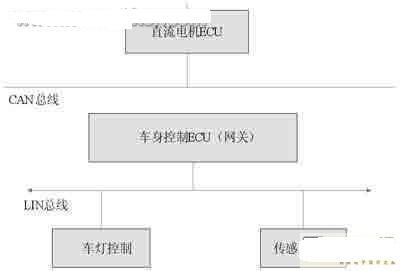
小車的各個電子控制單元之間通過LIN總線和CAN總線連接。
本系統中CAN收發器采用了TLE6250G,電機信息的傳輸需要高速的數據傳輸率(200Kb/s)以達到實時控制電機的要求。CAN的數據發送速率高達1Mb/s,可工作于只接收模式和空閑模式,具有優良的EMC特性和各種保護功能;而LIN總線因為數據傳輸率較低以及從確保高安全性能的角度來考慮并不合適。
使用CAN、LIN結合的網絡結構可以兼顧CAN總線實時性強、可靠性高、通信速率快、互操作性好、靈活性高和LIN網絡結構簡單、成本低的特點,更好地搭建汽車的網絡系統。
本系統采用了TLE6258系列LIN總線收發器,它作為介于協議控制器和物理總線之間的接口,特別適合在汽車和工業應用的LIN系統中用來驅動總線,且可用于標準的ISO9141系統。TLE6258提供空閑模式以減少電流損耗,通過在總線上發送喚醒幀,可把主機或從機從空閑模式喚醒,返回到正常的操作模式。圖4是本系統的LIN總線硬件電路圖。
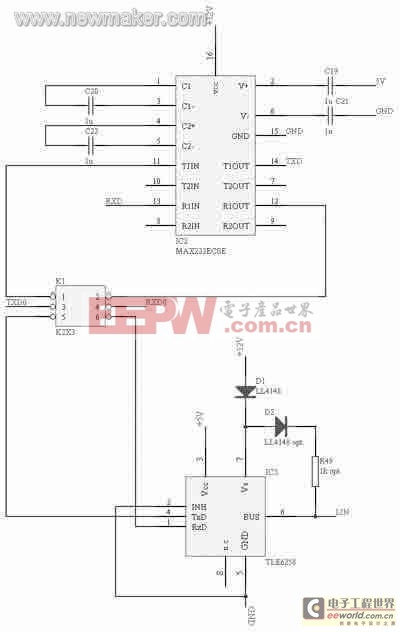
圖4 串行通信/LIN總線硬件電路
軟件設計
系統中各個ECU通過CAN總線發送接收命令,實現相互通信,從而實現數據的共享等。軟件設計基于DAVE和KEIL軟件編寫,程序主要由CAN初始化、發送數據和接收數據三部分組成,如圖5所示。

圖5 主程序流程圖
本設計方案可實現分布式車身控制系統的基本功能,且結構簡單、成本低。此外,這一設計思想同樣也適用于真車的控制。汽車電子技術的不斷進步,將促使CAN、LIN和正在發展的更高速、具有容錯性的總線技術有機組合,構成安全、舒適,更滿足人們需求的汽車網絡。(end) 光電開關相關文章:光電開關原理

評論