在PSoC4平臺上開發步進電機控制系統

3. 步進電機控制原理及主要商用控制方案分析
① 步進電機控制原理
兩相HB型步進電機是步進電機家族中應用最為廣泛的一種,具有分辨率高,轉矩大和性價比高的優點。其缺點是低速時的振動大和高速時的噪音。采用細分步進驅動是降低振動和噪音的有效手段。
圖2表示兩相HB型步進電機的4細分微步進的各相電流基準波形。各相電流值的峰值相等,相位偏差90°,電機相電流將跟蹤此基準波形,由于電機實際相電流的連續性,其平均曲線將變成正弦波。
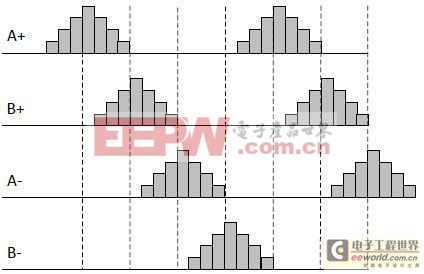
圖2:4細分微步進的電流基準波形
② 步進電機主要商用控制方案分析
目前市場上比較成熟的步進電機控制方案大致有兩種,區別主要在產生細分正弦波的方式上,分別為偏硬件和偏軟件的方案。偏硬件的方案由CPLD和DAC產生基準正弦波,偏軟件的方案由MCU及其內部PWM產生基準正弦波。
1)基于CPLD的偏硬件方案分析
圖3為基于CPLD的偏硬件方案控制框圖,CPLD根據雙四拍時序控制雙全橋驅動電路的開通。其內部存儲有基準正弦波的細分值數字表,此細分表有DAC轉換成模擬電壓與電機相電流的采樣值進行比較后控制雙全橋驅動電路,可以使電機相電流準確跟蹤正弦基準值。
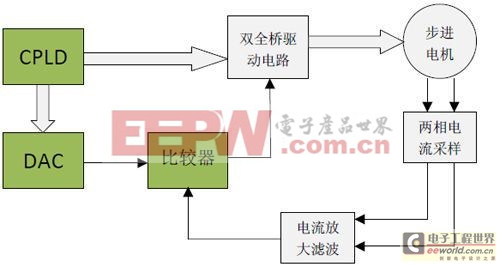
圖3:基于CPLD的偏硬件方案控制框圖
2)基于MCU的偏硬件方案分析
圖4為基于MCU的偏軟件方案控制框圖,MCU對電機兩相電流進行實時采樣,進行ADC轉換后與細分正弦波的基準值進行比較,根據比較的結果決定PWM的開通,從而使電機產生細分正弦的相電流。
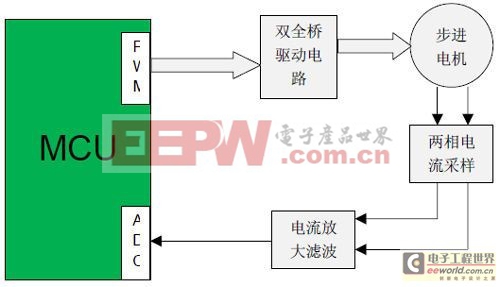
圖4:基于MCU的偏軟件方案控制框圖
綜合上述兩種方案不難看出,CPLD方案可以產生100K以上的pps(pulse per second),但系統所需器件多,成本較高。MCU方案成本有所降低,但由于ADC采樣帶來的相位滯后和閉環控制算法耗時較長限制了電機的pps,一般在50K以下,如果要繼續提高,需要采用高檔的MCU或DSP,也會增加成本。






評論