基于單片機的超聲波汽車報警系統的設計

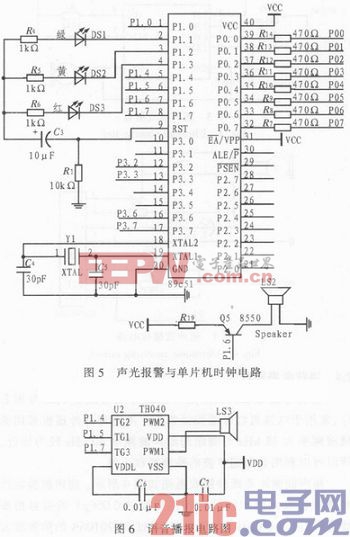
1)聲光報警電路
光報警電路由單片機P1.1、P1.2、P1.3輸出高低電平來控制,P1.6端口控制蜂鳴器,輸出PWM波,由用戶通過按鍵設定報警距離。當達到用戶設定的報警值時,P1.6腳輸出PWN波。其中PWM(Pulse Width Modulation)是一種脈寬調制技術。所謂PWM控制技術就是控制半導體開關器件的導通與關斷,從而得到一系列幅值相等而寬度不相等的脈沖,可以用這種來代替正弦波或其它所需要的波形。電路如圖5所示。
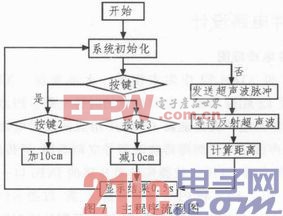
2)語音報警電路
語音報警電路采用語音芯片TH040來實現:TH040型智能語音芯片是具有40秒語音燒錄功能的高質量智能語音芯片,支持PWM這種高質量、高速率的語音輸出方式,而且有8個輸入/輸出腳位可供選擇。接法與管腳圖如圖6所示。用語音芯片時都要給語音芯片一個大于100 μs時間的復位高電平。接著再給TG2幾個脈沖TH040芯片就發出第幾段語音。
3)顯示及按鍵電路
顯示電路采用四位共陽數碼管實現,位碼用PNP三極管8550驅動,采用動態顯示方法。用戶可以通過按鍵設置報警距離。
3 軟件部分的設計
超聲波測距器的軟件設計主要由主程序、超聲波發生子程序、超聲波接收中斷程序、按鍵中斷與加減計數字程序、PWM波生成程序及顯示子程序組成。由于C語言程序有利于實現較復雜的算法,匯編語言程序具有較高的效率并且容易精確計算,故采用C語言與匯編語言結合編寫。主程序流程圖如圖7所示。
3.1 超聲波的發射
超聲波40 kHz是由芯片NE555構成的硬件電路產生的,故要用P1.0控制發射及關斷時間,P1.0為高電平時發射超聲波,反之則不發出超聲波。實驗發現,一次發出4個超聲波脈沖比較合適,因為超聲波發射出去的同時不能打開INT0中斷,以防超聲波剛發出就被超聲波接收探頭接收,以至不能實現測距。4次超聲波的發射需要時間125μs,故發出超聲波的端口P1.0需要能保持125μs的高電平;發送結束后給標志位置0。
3.2 超聲波的接收
等待接收超聲波回波,有回波了就會在INT0口產生低電平,產生中斷,執行計算距離,送數碼管顯示。實驗證明CX20106A接收超聲波(無信號時輸出高電平),具有很高的靈敏度和較強的抗干擾能力。適當更改電容C4的大小可以改變接收電路的靈敏度和抗干擾能力。
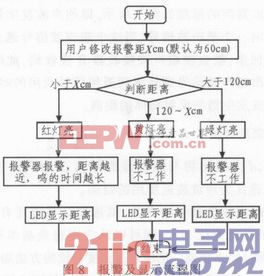
3.3 報警與顯示電路流程圖
4 結束語
本設計通過單片機與數碼管實現測距計算與實時顯示,同時用戶還可以通過按鍵設置倒車報警距離,當達到設定的報警距離時系統將進行語音報警,方便用戶使用。另外系統設置了分段指示燈,提高了倒車安全系數。另外發射探頭的頻率信號來自單片機系統,準確穩定可靠,而且可以隨時通過軟件編程來加以控制,以驅動相應發射探頭。本系統彌補了中、低端汽車報警系統不能實現準確測距和實時顯示倒車距離的問題,具有集成度高、測量范圍廣、成本低等特點,能滿足駕駛員在實際倒車中的需求,具有一定的理論和實用價值。

電路圖符號相關文章:電路圖符號大全
負離子發生器相關文章:負離子發生器原理 塵埃粒子計數器相關文章:塵埃粒子計數器原理 蜂鳴器相關文章:蜂鳴器原理 晶振相關文章:晶振原理










評論