基于STC89C52單片機的體操機器人系統設計

方法一:使用一個定時器加軟件延時實現。
使用一個定時器定時20ms的舵機周期。每一路舵機所需的0.5ms至2.5ms的正脈寬則不用定時器來實現,而是用延時程序來實現。給每一路舵機定義一個無符號整型數來表征舵機不同的轉角。每一次進20ms中斷時先將所有端口置“1”,然后開始計數,當計數值與舵機的給定值相等時就把對應的端口輸出置“0”。這樣改變給定值就能改變PWM波的占空比,從而控制舵機的轉動。這種方法只用到了一個定時器,節約資源,用整型數代替舵機不同的轉角,便于程序的編寫。
void timer0() interrupt 1 using 1 //20ms到一次中斷,定時中斷T0
{
TH0=0x70;
TL0=0x00;
P0=0xFF;
P1=0xFF;
PWM();
}
void PWM()
{
uint counter = 0;
while(counter 130)
{
if(counter == num[0])
P10 = 0;
if(counter == num[1])
P11 = 0;
......
if(counter == num[9])
P07 = 0;
counter++;
}
}
方法二:使用兩個定時器實現。
上一種方法的優點是程序簡單,占用資源少。但是軟件延時的時間與單片機的晶振頻率和循環程序中語句的條數有關,即同一個數值代表的舵機轉角并不是確定的。第二種方法用一個定時器定時20ms周期,另一個定時器定時100us(可以更改),來代替循環定時程序。從而增強了程序的通用性。
void timer1()interrupt3 using 2
{
static count;
count = count%25;
Count++;
if(count == num[0])
P00 = 0;
......
if(counter == num[9])
P07 = 0;
}
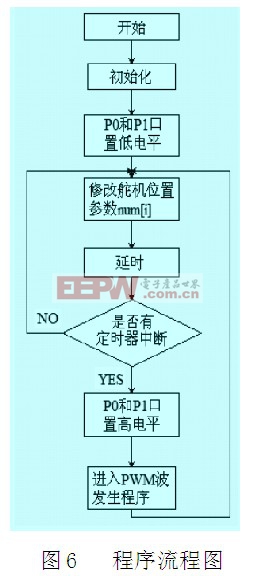
舵機控制程序采用模塊化設計方式,增強了程序的可讀性和可移植性,程序流程圖如圖6所示。
5 結束語
在本文的體操機器人系統設計中,使用了STC89C52單片機小系統。該小系統具有通用性強,價格低廉,工作穩定的特點。通過編寫改進的脈寬差法控制程序可對10路舵機進行控制,在2011年蘭州舉行的中國機器人大賽暨Robocup公開賽中,該型機器人發揮穩定,獲得了體操機器人組全國一等獎。
參考文獻:
[1] 王志良,競賽機器人制作技術[M].北京:機械工業出版社,2007.5.
[2] 王立權,機器人創新設計與制作[M].北京:清華大學出版社,2007.6.
[3] 張濤,機器人引論[M].北京:機械工業出版社,2010.4
[4] 熊有倫,機器人技術基礎[M].武漢:華中理工大學出版社,1996.8.
[5] 劉廣瑞,機器人創新制作[M].西安:西北工業大學出版社,2007.2.












評論