智能PWM控制的機車制動控制單元的設計

然后由此得到各修正參數:
![]()
其中ku為輸出量的比例因子:

經過上述過程,可以得到模糊控制器的3個參數:
![]()
5 軟件實現
在系統控制電路中,單片機選用ATMEL公司的AT89C55,程序選用C51進行編寫。本系統主要模塊有主程序、T0中斷子程序、模糊PID算法子程序等。主程序流程如圖4所示,模糊PID算法的程序流程如圖5所示。
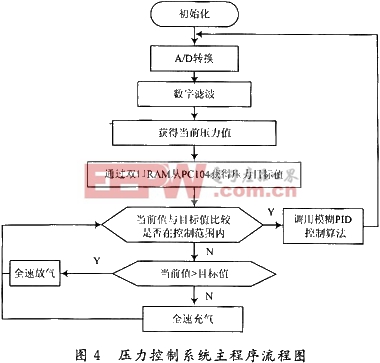

主程序進行一系列的初始化后循環等待中斷;T0產生2 ms定時中斷,T0中斷服務子程序對中斷次數計數,每50次中斷(100 ms)為一個控制周期,每一個控制周期讀入當前氣缸壓力采樣值,調用模糊PID子程序對氣缸壓力進行精確控制。
6 結 語
(1) 系統充分利用了單片機和PC104的軟硬件,系統結構簡單、可靠性高、抗干擾能力強。
(2) 系統通過模糊PID算法由單片機產生PWM信號實現對機車制動缸和均衡風缸的壓力控制,系統調壓范圍廣,動、靜態性能好、控制精度高、自適應能力強。
通過在株洲電力機車廠對制動機的調試表明,基于智能PWM控制的制動控制單元對機車制動機制動缸和均衡風缸的控制精度可達到±0.5 kPa,可以滿足電力機車制動控制的需要。

pid控制器相關文章:pid控制器原理
pwm相關文章:pwm原理

評論