一種三MCU系統的硬件實現

3.1 PWM采樣方法[1]
PWM脈寬調制是利用相當于基波分量的信號對三角載波進行調制,脈沖寬度由正弦波和三角波自然相交而成的自然采樣法,如圖4所示。其中圖4(a)為對稱規則采術,設三角載波周期為Tt,采樣周期為Ts(Ts=Tt),當以三角波頂點t1為采樣點時:
ton=Ts/4(1+Usinωt1),toff=Ts/4(1-Usinωt1) (1)
tpw=Ts/2(1+Usinωt1)
采樣點時刻t1只與載波比N有關,與調節器幅比M無關(其中t1=kT1,k=0,1,2,…N-1)。
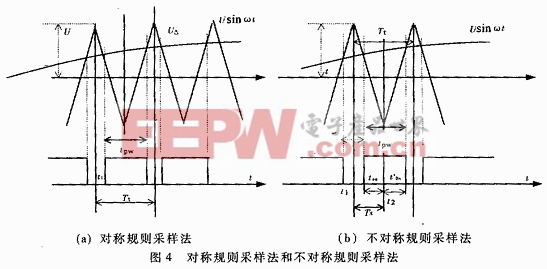
對于圖4(b)所示的不對稱規則采樣法,既在三角波的頂點位置又在底點位置對正弦波進行采樣時,采樣周期Ts是三角波周期的1/2:
ton=Ts/2(1+Usinωt1)
toff=Ts/2(1-Usinωt1) (2)
t'on=Ts/2(1+Usinωt2)
t'off=Ts/2(1-Usinωt2)
脈沖寬度為:
tpw=ton+t'on=Tt/2[1+U/2(sinωt1+sinωt2)]
t1=kTt/2(當k=0,2,4,6,…)
t2=kTt/2(當k=1,3,5,7,…)
其中k=0,1,2,3…,當k為偶數時是頂點采樣,k為奇數時是底點采樣。
3.2 軟件結構

軟件流程如圖5所示。由于IPM智能模塊只有一路+15V控制電源,為了使IPM正常啟動,上電開始時通過依次開通下臂的IGBT,在上臂IGBT上進行足夠脈寬的PWM輸出,對IMP上臂驅動電源(VUFB、VVFB、VWFB)和下臂驅動電源(VUFS、VVFS、VWFS)上的自舉電容進行充電。當自舉電容為100μF,自舉電阻為50Ω的情況下,自舉充電時間約為5ms。自舉完成后通過檢測IPM的Fo輸出判斷IPM的運行情況。正常情況Fo輸出判斷IPM的運行情況。正常情況Fo輸出的信號為高電平,當此端口輸出低脈沖時,表示模塊處于故障狀態,通過INT4外部中斷程序停止智能模塊的輸出。
三角載波是通過定時器由軟件方式實現。載波周期定時器和采樣定時器之間的關系決定著規則采樣的性質。當載波周期定時器和采樣定時器的周期相同時是對稱規則采樣,通過(1)式設定定時器TA0~TA2的預載寄存器;當載波半周期定時器和采樣定時器的周期相同時是對稱規則采樣,通過(2)式進行計算設定。
通過上述兩種方法可得到不同頻率的三相PWM波形。對變頻器輸出的特性分析,不對稱規則采樣所形成的階梯波比對稱規則采樣時更接近于正弦波,輸出電壓也高于前者。當載波比N等于3或3的倍數時,逆變器輸出電壓中偶次諧波分量基本可以消除,其它的高次諧波分量的幅值也較小,但相應的中斷次數和計算量將成倍增加。當然基波信號不一定是正弦波,可以采用其它優化PWM調制方法,同時也可以采用其它采樣方法,但需要將存儲在微處理器中的基波數據和采術計算公式進行調整,可以進行多種嘗試以達到更好的諧波特性和更高的功率因數。
該變頻器由于采用集成度較高的變頻專用微處理器和功能更強的智能功率模塊,體積小、成本低,特別適合家電產品和民用產品使用。主要的缺點是省去光耦后IPM 與微處理器只能置于同一塊PCB板上,而且上下臂控制信號的走線要盡量短。如微處理器和IPM較遠時仍需通過光耦隔離,采用原有的光耦接法。
采用不對稱規則采樣所形成的階梯波更接近于正弦波。輸出頻率與輸出電壓對頻率指令執行速度快,指令周期短,同時智能功率模塊的開關頻率典型值達到5kHz,可以選用更大的載波比以縮短響應時間,滿足實時控制的需要。同時智能功率模塊的各種保護措施也是高了變頻器的可靠性。

電磁爐相關文章:電磁爐原理

評論