一種基于MSP430的可充電腦起搏器的設計

 1.2 脈沖發生器的組成及工作原理 脈沖發生器是系統的核心部件,它最終通過手術植入胸部皮膚下面,再經皮下通過導線把脈沖發生器與刺激電極起起來。基于體積和功耗的考慮,選擇美國TI公司生產的高集成度、低功耗的微處理器MSP430F169和短距離單片無線收發芯片TRF6900A來實現。MSP430F169作為內部刺激器的控制核心,接收外部遙控器發出并通過內外通信電路傳送的指令,產生電壓、頻率、脈寬和電極可調的脈沖信號。其中電壓調節范圍為0~10.5V,常用為1~3.5V,可調精度為0.1V;頻率調節范圍為3~250Hz,常用為130~220Hz,可調精度為5Hz;脈寬調節范圍為60~450μs,常用為60~250μs,可調精度為30μs。刺激電極采用3.6V電壓工作,而最后需輸出0~10.5V的脈沖信號,所以MSP430F169的DA輸出端與三倍壓電路相連。當輸出電壓幅值設置為0~3.6V時,該部分電路停止工作,從而大大降低了系統功耗。為了防止突發高頻刺激對病人的危害,專門設計了一個限頻電路,通過硬件的方式將刺激器輸出信號頻率限定在200pps(Pulse Per Second)以內。 MSP430系列單片機是美國德州儀器(TI)公司生產的高集成度、高精度的單芯片系統(SOC),是目前工業界中具有最低功耗的flash 16-bit RISC微控制器。MSP430 F169具有豐富的片內外設,是一款性價比極高的單片機,利用它作系統的控制核心,不僅極大地簡化了系統硬件電路,還大大提高了系統的性價比。MSP430單片機集中體現了現代單片機先進的低功耗設計理念,其時鐘系統提供了豐富的中硬件組合形成。它包括一個片內DCO和兩個晶體振蕩器,可以產生三種系統適用的時鐘信號,支持六種工作方式,有五種低功耗模式,可以通過軟件對內部時鐘系統進行不同設置來控制芯片,使它處于不同工作方式,從而使整個系統達到最低的功耗并發揮最優的性能,所以該單片機非常適合腦起搏器的設計要求。利用芯片內置的自動掃描功能,ADC可以不需要中央處理器的協助而獨立地工作,從而讓處理器去執行其它操作或進入省電工作模式。當CPU接收到來自遙控器的檢測刺激器內法拉電容的電壓信號的指令時,啟動ADC,經端口6進入ADC進行模/數轉換,轉換的結果被自動存放在相應通道的寄存器中,并通過無線收發器送到外部遙控器進行液晶顯示。MSP430F169產生的脈沖信號經DAC12輸出后通過倍壓限頻電路、延伸導線和刺激電極刺激靶點。
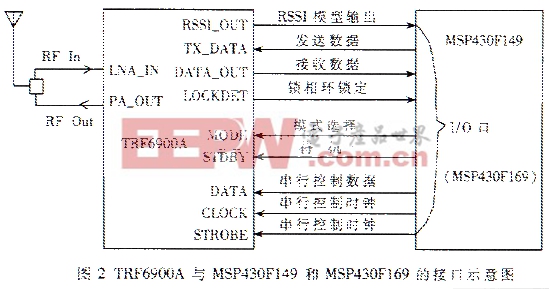
1.2 脈沖發生器的組成及工作原理 脈沖發生器是系統的核心部件,它最終通過手術植入胸部皮膚下面,再經皮下通過導線把脈沖發生器與刺激電極起起來。基于體積和功耗的考慮,選擇美國TI公司生產的高集成度、低功耗的微處理器MSP430F169和短距離單片無線收發芯片TRF6900A來實現。MSP430F169作為內部刺激器的控制核心,接收外部遙控器發出并通過內外通信電路傳送的指令,產生電壓、頻率、脈寬和電極可調的脈沖信號。其中電壓調節范圍為0~10.5V,常用為1~3.5V,可調精度為0.1V;頻率調節范圍為3~250Hz,常用為130~220Hz,可調精度為5Hz;脈寬調節范圍為60~450μs,常用為60~250μs,可調精度為30μs。刺激電極采用3.6V電壓工作,而最后需輸出0~10.5V的脈沖信號,所以MSP430F169的DA輸出端與三倍壓電路相連。當輸出電壓幅值設置為0~3.6V時,該部分電路停止工作,從而大大降低了系統功耗。為了防止突發高頻刺激對病人的危害,專門設計了一個限頻電路,通過硬件的方式將刺激器輸出信號頻率限定在200pps(Pulse Per Second)以內。 MSP430系列單片機是美國德州儀器(TI)公司生產的高集成度、高精度的單芯片系統(SOC),是目前工業界中具有最低功耗的flash 16-bit RISC微控制器。MSP430 F169具有豐富的片內外設,是一款性價比極高的單片機,利用它作系統的控制核心,不僅極大地簡化了系統硬件電路,還大大提高了系統的性價比。MSP430單片機集中體現了現代單片機先進的低功耗設計理念,其時鐘系統提供了豐富的中硬件組合形成。它包括一個片內DCO和兩個晶體振蕩器,可以產生三種系統適用的時鐘信號,支持六種工作方式,有五種低功耗模式,可以通過軟件對內部時鐘系統進行不同設置來控制芯片,使它處于不同工作方式,從而使整個系統達到最低的功耗并發揮最優的性能,所以該單片機非常適合腦起搏器的設計要求。利用芯片內置的自動掃描功能,ADC可以不需要中央處理器的協助而獨立地工作,從而讓處理器去執行其它操作或進入省電工作模式。當CPU接收到來自遙控器的檢測刺激器內法拉電容的電壓信號的指令時,啟動ADC,經端口6進入ADC進行模/數轉換,轉換的結果被自動存放在相應通道的寄存器中,并通過無線收發器送到外部遙控器進行液晶顯示。MSP430F169產生的脈沖信號經DAC12輸出后通過倍壓限頻電路、延伸導線和刺激電極刺激靶點。 1.3 外部遙控器的組成及工作原理 外部遙控器以MSP430F149為控制核心,采用中文液晶菜單界面,四按鍵控制,為醫護人員提供直觀簡易的操作方式。醫護人員只要按照液晶菜單的提示進行相應的按鍵操作即可。遙控器開機后,MSP430F149首先對各種參數進行編碼和初始化,并準備接收由醫護人員通過按鍵發送過來的指令,并將這些指令通過外部通信模塊TRF6900A發送到內部通信模塊,經解碼后將信號送至刺激器CPU,然后CPU執行相應的操作并把執行后的結果送回遙控器顯示窗口。 系統采用COG-MOBI2006-02 LCD模塊,內部使用NEC公司生產的uPD16682A控制器,可顯示漢字及圖形,共有21個引腳,管腳分布如表1所示。采用8位串行數據輸入方式,可以使用MSP430F149的USART0模塊對其進行控制,將SI、A0、SCL、/CS1、/RES分別與MSP430F149的P3.1(SIMO0)、P3.2(SOMI0)、P3.3(SCL)、P3.4、P3.5引腳相連即可。LCD控制器uPD16682A內部定義了一組命令,MCU通過向LCD發送這些命令和數據操作LCD,包括顯示開/關、行地址設置、列地址設置、寫數據以及電壓控制等。表1 MOBI2006的管腳分布 管腳號管腳名說 明管腳號管腳名說 明1,21NC不連接2~13 電壓控制14GND地15VCC電源16SI數據輸入17SCL時鐘18A0數據/命令選擇19/RES復位20/CS1片選 外部遙控器為醫護人員提供四個操作按鍵,并利用軟按鍵輪詢技術將菜單和按鍵組合在一起從而在單一按鍵上實現不同的功能。菜單包括歡迎菜單、主菜單、次級菜單等三個層次,均由液晶顯示提供,每一組菜單都給醫護人員提供簡單直觀的提示。由于系統只有四個按鍵,所以采用查詢方式的獨立式按鍵電路,分別占用MSP430F149的四個口線。 1.4 內外通信模塊的組成及工作原理 外部遙控器對內部刺激器的控制主要通過內外通信模塊實現。TRF6900A是構成內外通信模塊的主要器件,是TI公司最新推出的短距離無線射頻芯片。該芯片采用FSK調制,使用ISP頻段,頻率無需申請,其有效數據傳輸距離為100m,數據傳輸速率高達50kbps,抗干擾能力強,功耗低,體積小,與MSP430系列單片機接口簡單,從而可以從從節省電路板空間。圖2是TRF6900A與MSP430F149和MSP430F169的接口示意圖。在內部刺激器中,TRF6900A與MSP430F169的P1口相連,利用P1口的中斷功能可實現低功耗性能;在外部遙控器中,TRF6900A與MSP430F149的P4口相連即可。 1.5 系統供電電路 供電是腦起搏器設計中的一大技術難題。為了避免體內刺激器電源能量耗盡后必須更換脈沖發生器帶給患者的痛苦以及節省巨額費用,本方案設計的腦起搏器可以進行非接觸式充電。患者在手術后到醫院隨訪問需要對體內刺激器進行電壓檢測,若電量不足,則由醫護人員通過遙控器對體內電池進行充電。 該非接觸式經皮充電系統是基于線圈耦合的基本原理改造實現的。傳統方法是在耦合線圈的輸入端加交流電,輸出端就會通過與輸入端之間的互感效應產生電能。但這種方法需要在鐵氧體等鐵芯片纏繞很多細導線,這會在鐵芯生線圈上產生能量損耗,致使輸入的部分電能變成熱量,電源傳輸效率非常低,通常只有20%~30%;而且由于使用的是細導線,線圈無法傳輸大電流。
1.3 外部遙控器的組成及工作原理 外部遙控器以MSP430F149為控制核心,采用中文液晶菜單界面,四按鍵控制,為醫護人員提供直觀簡易的操作方式。醫護人員只要按照液晶菜單的提示進行相應的按鍵操作即可。遙控器開機后,MSP430F149首先對各種參數進行編碼和初始化,并準備接收由醫護人員通過按鍵發送過來的指令,并將這些指令通過外部通信模塊TRF6900A發送到內部通信模塊,經解碼后將信號送至刺激器CPU,然后CPU執行相應的操作并把執行后的結果送回遙控器顯示窗口。 系統采用COG-MOBI2006-02 LCD模塊,內部使用NEC公司生產的uPD16682A控制器,可顯示漢字及圖形,共有21個引腳,管腳分布如表1所示。采用8位串行數據輸入方式,可以使用MSP430F149的USART0模塊對其進行控制,將SI、A0、SCL、/CS1、/RES分別與MSP430F149的P3.1(SIMO0)、P3.2(SOMI0)、P3.3(SCL)、P3.4、P3.5引腳相連即可。LCD控制器uPD16682A內部定義了一組命令,MCU通過向LCD發送這些命令和數據操作LCD,包括顯示開/關、行地址設置、列地址設置、寫數據以及電壓控制等。表1 MOBI2006的管腳分布 管腳號管腳名說 明管腳號管腳名說 明1,21NC不連接2~13 電壓控制14GND地15VCC電源16SI數據輸入17SCL時鐘18A0數據/命令選擇19/RES復位20/CS1片選 外部遙控器為醫護人員提供四個操作按鍵,并利用軟按鍵輪詢技術將菜單和按鍵組合在一起從而在單一按鍵上實現不同的功能。菜單包括歡迎菜單、主菜單、次級菜單等三個層次,均由液晶顯示提供,每一組菜單都給醫護人員提供簡單直觀的提示。由于系統只有四個按鍵,所以采用查詢方式的獨立式按鍵電路,分別占用MSP430F149的四個口線。 1.4 內外通信模塊的組成及工作原理 外部遙控器對內部刺激器的控制主要通過內外通信模塊實現。TRF6900A是構成內外通信模塊的主要器件,是TI公司最新推出的短距離無線射頻芯片。該芯片采用FSK調制,使用ISP頻段,頻率無需申請,其有效數據傳輸距離為100m,數據傳輸速率高達50kbps,抗干擾能力強,功耗低,體積小,與MSP430系列單片機接口簡單,從而可以從從節省電路板空間。圖2是TRF6900A與MSP430F149和MSP430F169的接口示意圖。在內部刺激器中,TRF6900A與MSP430F169的P1口相連,利用P1口的中斷功能可實現低功耗性能;在外部遙控器中,TRF6900A與MSP430F149的P4口相連即可。 1.5 系統供電電路 供電是腦起搏器設計中的一大技術難題。為了避免體內刺激器電源能量耗盡后必須更換脈沖發生器帶給患者的痛苦以及節省巨額費用,本方案設計的腦起搏器可以進行非接觸式充電。患者在手術后到醫院隨訪問需要對體內刺激器進行電壓檢測,若電量不足,則由醫護人員通過遙控器對體內電池進行充電。 該非接觸式經皮充電系統是基于線圈耦合的基本原理改造實現的。傳統方法是在耦合線圈的輸入端加交流電,輸出端就會通過與輸入端之間的互感效應產生電能。但這種方法需要在鐵氧體等鐵芯片纏繞很多細導線,這會在鐵芯生線圈上產生能量損耗,致使輸入的部分電能變成熱量,電源傳輸效率非常低,通常只有20%~30%;而且由于使用的是細導線,線圈無法傳輸大電流。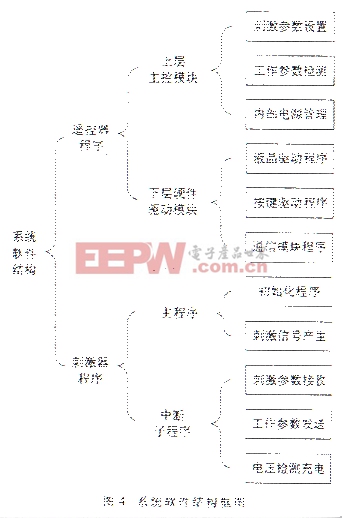 經改造后的充電系統原理圖如圖3所示。,交流市電通過濾波整流后,由諧振電路提高其頻率再通過線圈耦合的方式傳輸到次級圈,再經整流后給法拉電容充電;同時微處理 器MSP430F169通過內部12位ADC檢測法拉電容電壓,并將該電壓值進行編碼,然后通過內外通信模塊TRF6900A傳輸到外部遙控器的微處理器MSP430F149,CPU將該電壓編碼值與預設值進行比較,若小于該預設值則繼續充電,若達到該預設值則關閉外部充電電路,充電結束。 實驗表明,提高輸入交流電的頻率可以達到與增加線圈匝數同等的效果。所以本系統采用高頻電能傳送方式,可以大大減少線圈匝數,節省內部中電路空間。同時,選NiFe等高性能導體兼容材料作芯,大大降低了鐵芯和線圈造成的損耗,提高了電源傳輸效率。 2 系統軟件設計 根據腦起搏器的硬件組成,系統軟件分為兩個部件,如圖4所示。一部分是在外部接受器上運行的程序,在結構上分為兩層,上層是與功能相關的主控模塊和各功能模塊,底層是硬件驅動程序模塊。主控模塊和功能模塊控制整個程序的流程,當需要操作硬件時調用硬件驅動程序提供的接口函數;底層硬件驅動包括液晶驅動程序、按鍵驅動程序和TRF6900通信程序,為上層主控模塊和功能模塊提供接口函數。另外一部分是在內部刺激器上運行的程序,主要包括主程序和中斷子程序。其中主程序主要負責系統初始化和工作刺激信號的產生,中斷子程序主要負責從外部遙控器發送過來的控制信號的接收、電池電壓信號及工作記錄信號的檢測與發送以及對內部電池進行充電。 腦起搏器因其具有療效好、安全性高、可逆、可通過術后調整達到最佳癥狀控制效果和最少副作用等優點,已經成為治療帕金森病的主要外科手段。在我國,設計符合本國國情的腦起搏器已經成為眾望所歸。本文提供了一種基于MSP430的可充電腦起搏器的設計方案,與國外生產的腦起搏器相比,具有更高的性價比。
經改造后的充電系統原理圖如圖3所示。,交流市電通過濾波整流后,由諧振電路提高其頻率再通過線圈耦合的方式傳輸到次級圈,再經整流后給法拉電容充電;同時微處理 器MSP430F169通過內部12位ADC檢測法拉電容電壓,并將該電壓值進行編碼,然后通過內外通信模塊TRF6900A傳輸到外部遙控器的微處理器MSP430F149,CPU將該電壓編碼值與預設值進行比較,若小于該預設值則繼續充電,若達到該預設值則關閉外部充電電路,充電結束。 實驗表明,提高輸入交流電的頻率可以達到與增加線圈匝數同等的效果。所以本系統采用高頻電能傳送方式,可以大大減少線圈匝數,節省內部中電路空間。同時,選NiFe等高性能導體兼容材料作芯,大大降低了鐵芯和線圈造成的損耗,提高了電源傳輸效率。 2 系統軟件設計 根據腦起搏器的硬件組成,系統軟件分為兩個部件,如圖4所示。一部分是在外部接受器上運行的程序,在結構上分為兩層,上層是與功能相關的主控模塊和各功能模塊,底層是硬件驅動程序模塊。主控模塊和功能模塊控制整個程序的流程,當需要操作硬件時調用硬件驅動程序提供的接口函數;底層硬件驅動包括液晶驅動程序、按鍵驅動程序和TRF6900通信程序,為上層主控模塊和功能模塊提供接口函數。另外一部分是在內部刺激器上運行的程序,主要包括主程序和中斷子程序。其中主程序主要負責系統初始化和工作刺激信號的產生,中斷子程序主要負責從外部遙控器發送過來的控制信號的接收、電池電壓信號及工作記錄信號的檢測與發送以及對內部電池進行充電。 腦起搏器因其具有療效好、安全性高、可逆、可通過術后調整達到最佳癥狀控制效果和最少副作用等優點,已經成為治療帕金森病的主要外科手段。在我國,設計符合本國國情的腦起搏器已經成為眾望所歸。本文提供了一種基于MSP430的可充電腦起搏器的設計方案,與國外生產的腦起搏器相比,具有更高的性價比。













評論