Kinco伺服系統在注塑機機械手上的應用

三、伺服系統介紹
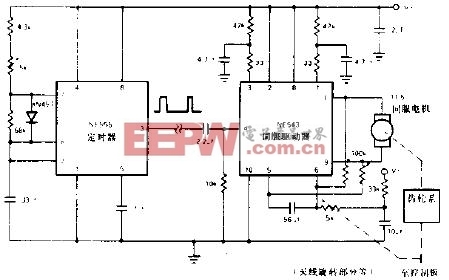
1、接線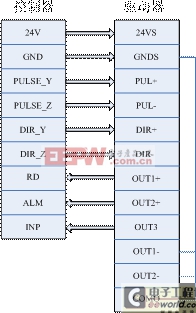
控制卡-伺服接線圖
伺服24V邏輯電由控制卡直接提供,伺服脈沖信號及數字輸入輸出信號與控制卡對應連接。
2、伺服設置
脈沖模式:脈沖方向。
數字輸入設置:屏蔽DIN1使能控制(伺服上電自使能)、屏蔽DIN5和DIN6正負常閉限位(限位處理由控制器完成)。
數字輸出設置:驅動器就緒(OUT1)、驅動器報警(OUT2)、位置到(OUT3,原點歸位完成)。對于伺服系統,開機后必須要進行原點歸位工作,通過原點歸位操作找到橫行軸的原點后,伺服系統才能正常的工作。
齒輪比計算:讓伺服回原點,走完行程S,觀察到伺服齒輪前脈沖數據為10000(控制器發10000脈沖,橫行軸走行程S)。
由公式: (減速比i=5,分辨率r=10000,皮帶輪直徑D=60.96mm,S=1000mm)計算得出齒輪后脈沖數據,從而計算出齒輪比,為966:37。
3、伺服調試
機械手傳動系統采用皮帶傳動,剛性相對較軟,增益高時容易導致系統產生震蕩。而工藝要求伺服平穩滑順的進行高速定位,不能出現過沖甚至震蕩。

相關推薦
-
-
-
star800 | 2007-09-28
-
-
-
-
informationspy | 2007-08-05
-
-
黃品冠 | 2007-09-18
-
-
-

-
-

-
-
-
-
研控科技 | 2021-08-03
-
-
評論