如何改善ERM 及LRA 執行器的起動與停止性能


圖 3:過驅動及制動與 0-60 加速時間類似
同樣,某些執行器有極快的起動時間,而另一些則起動時間極慢。它取決于執行器的設計、制造和類型,所有這些都可以在實驗室中進行實驗特性化。對于觸摸屏智能手機的觸覺,用戶可能會察覺到一部電話的鍵盤點擊比另一部更靈敏。這是由執行器響應時間決定的。
要改善執行器性能,執行器驅動器可對其進行過驅動,實現更快的起動時間,同時還可反向驅動,實現更快的停止時間。對于 ERM,實現過驅動可在開始時應用更高的 DC 電壓,應用負電壓可實現制動。
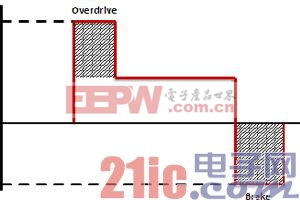
圖 4:ERM 過驅動及制動驅動波形
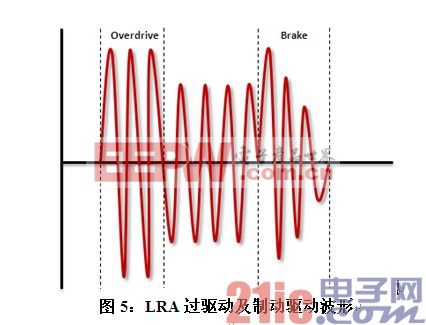
對于 LRA,過驅動是在開始時應用更高的 AC 電壓,而實現制動則應用 180 度異相位信號。
德州儀器 (TI) 最新 DRV2605 觸覺驅動器具有稱之為“智能環路”的特性,其可使用閉環反饋應用,精確過驅動及制動信號,最大限度縮短執行器的起動與停止時間。智能環路是通過主動監測執行器的電動勢(反電動勢)信號,準確控制驅動器電壓與加速實現這一點的。
最終結果是為 ERM 與 LRA 實現可簡化軟件編程、縮短起動與制動時間 50% 的自動過驅動與制動。DRV2605 的自動執行器診斷與電平跟蹤特性可在各種環境條件下實現一致的加速。如果您想獲得比同類競爭產品快 0-60 加速,請將 DRV2605 用作測試驅動器。


評論