基于Taylor展開法整定MIC-PID控制器參數

2 MIC-PID控制器參數的整定
設一階不穩定時滯過程為:

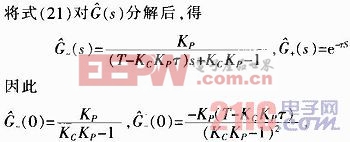
對式(20)分母中的純滯后環節采用一階Taylor逼近得
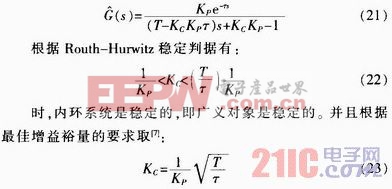
從式(22)可以看出純滯后時間必須小于時間常數,即必須滿足τ≤T,否則等效對象是不穩定的,由此可見,這一結果不適合大純滯后對象。
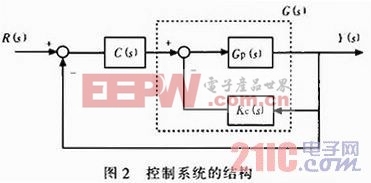
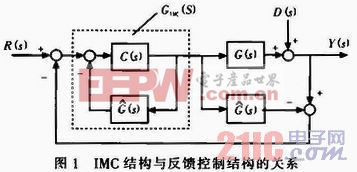
經過內環參數整定后,內環路可以用一個等效穩定對象G(s)來代替,如果外環路采用內模控制方法,則控制系統的等效框圖仍如圖1所示。

這里,αa一般取O.05至0.1之間的某個常數。
3 控制過程仿真
設被控過程對象模型為:
設被控過程對象模型為:
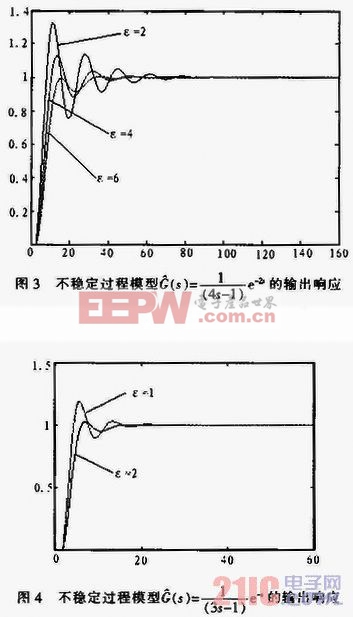
由圖3和圖4可見,如果純滯后時間變小有利于系統穩定,純滯后時間變大則系統容易發散,因此在整定參數時,可以人為地將延遲時間加大,以防止參數攝動時,系統不穩定。
4 結論
文中采用內模控制原理,針對一類不穩定時滯過程,采用雙環控制結構,首先使廣義對象(內環)穩定,然后按內模控制原理設計外環控制器,利用Taylor級數展開法得到了PID參數整定公式。通過仿真實例對IMC-PID控制器進行驗證,結果表明在IMC-PID控制器的作用下被控系統不但具有良好的魯棒性,而且調節快速,便于實際系統應用。

pid控制器相關文章:pid控制器原理



評論