汽車自適應前照燈的功能設計及實現

若遇到起伏不平的路況,則AFS 會根據前軸和后軸高度差的變化量來自動調整前照燈的投射俯仰角度,盡量使光軸回復到原先的水平狀態,以能達到良好的照明效果,又不會對迎面車輛的司機造成眩目。前照燈需調整的投射俯仰角度可根據文獻[5]算出。
1. 4 城市照明模式
對于城市公路來說,照明條件較好,且車流人流密度都明顯增大,防止眩目就顯得尤為重要。眩光分為直接眩光和反射眩光,這里主要為直接眩光。一般要求,在會車時,射向對面駕駛員的光照強度不要超過1 000cd。是否進入城市照明模式由光敏傳感器和車速傳感器或GPS 來進行判斷。當光強達到閾值,且車速不超過60km / h時,城市道路照明模式便自動開啟,左右近光燈的驅動功率均減小以降低亮度,且前照燈在垂直方向上會向下偏轉一定角度,從而降低射進對面駕駛員眼中的光照強度。下圖4 為進入城市前后的照明效果對比圖。

圖4 AFS 城市照明模式對比圖
1. 5 彎道照明模式
當汽車在彎道上行駛時,因為前照燈的光線和車輛的行駛方向一致,所以不可避免會存在照明暗區,極易因為不能及時發現彎道上的障礙物而引發交通事故。是否進入彎道照明模式由汽車的方向盤轉角傳感器和車速傳感器或GPS 來判斷。當轉向角超過12°并且車速超過30km / h 時開始工作,當轉向角9°或車速 5km / h 時停止工作。當AFS 獲知車輛進入彎道時,前照燈會旋轉一定角度,給彎道以足夠的照明,效果對比圖如圖5 所示。為了正面照明的需要,AFS 并不是同時控制左右近光燈的,如果車輛向右轉彎,則右燈向右側旋轉,如果向左轉彎,則左燈向左側旋轉。同時,左右近光燈的最大調節角度也是不同的,對于交通法規規定靠右行駛的國家,右側近光燈變化角度最大為5°,左側為15°。

圖5 AFS 彎道照明模式對比圖
由1. 2 節高速公路照明模式分析可知,只有剎車距離在前照燈的照明區域內才能保證汽車的安全行駛,所以要求前照燈旋轉后能照射到的彎道上的最大直線距離大于或等于剎車距離,由此不難得出前照燈需要旋轉的角度φ 。如圖6 所示,不難看出:

其中,x 為安全剎車距離,且x = Vt + S,V 表示初始車速,t 為反應時間,S 表示制動距離,R 表示彎道半徑。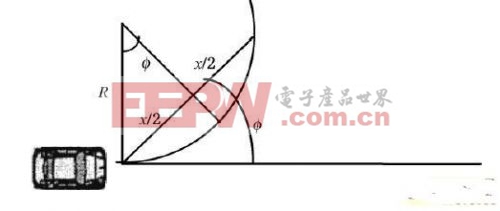
圖6 前照燈旋轉角度的計算
1. 6 惡劣天氣照明模式
1. 6. 1 陰雨天氣照明方式
陰雨天氣時,地面的積水會將行駛車輛打在地面上的光線,反射至對面會車司機的眼睛中,使其眩目,如圖7 所示。法國的一項民意調查表明,83% 的駕駛員認為,夜晚的反射眩光比直接眩光更令人感到不安,所以必須設法降低陰雨天氣產生的反射眩光。

圖7 積水反光造成眩目
由雨量傳感器獲得的數據即可判斷當前是否下雨,并能夠進一步獲知雨量的大小。一般汽車前面距離為5 ~ 25m 的路面可以產生反射眩光,AFS 可根據雨量大小適當降低前照燈的高度,對此范圍內的照度進行限制,從而避免反射眩光對車輛前方60m范圍內的駕駛員造成眩目。
1. 6. 2 霧霾天氣照明方式
霧霾天氣時,前照燈光線產生漫射且前照燈上布滿小水珠,使前照燈的亮度和穿透力降低,導致前方景像難以看清,司機的能見度很低,給交通帶來很大不便。由霧傳感器感知霧的大小和光敏傳感器感知光線的強弱從而啟動AFS。AFS 會提高前照燈的驅動功率和抬高前照燈的垂直高度,而且還會啟動車燈清洗裝置,沖洗前照燈上的小水珠,以增強前照燈光束的亮度和穿透力,從而提高前方道路的能見度與清晰度。
1. 6. 3 沙塵暴天氣照明方式
沙塵暴天氣和下霧天氣情況類似,雖然此時不存在小水珠,但是在沙塵暴天氣下會有大風,使前照燈上布滿灰塵,且四周隨時可能刮來不明物體。由風速傳感器、顆粒物傳感器和光敏傳感器判斷是否進入沙塵暴照明模式。這時,AFS 同樣會提高前照燈的驅動功率和抬高前照燈的垂直高度,同時啟動車燈清洗裝置,洗凈前照燈上的灰塵,此外,其中1 只前照燈會向外側旋轉一定角度以及時發現被風刮來的障礙物。
2 AFS 的實現方案
為了實現AFS 的功能,需要對AFS 的光源部分和控制部分分別進行研究。
2. 1 AFS 光源
傳統的前照燈光源難以實現AFS 的全部功能,相對于傳統AFS 的光源鹵素燈或HID 燈,LED 明顯的優勢是體積小、重量輕,從而節省了非常有限的AFS 燈具內部空間,較輕的重量也減小了電機的使用功耗。此外,由于單個LED 功率太小,所以在LED前照燈的設計中,一般將很多個LED 排列起來組成1只前照燈,如圖8 所示。如果對多個LED 進行不同的開關控制和旋轉,就可實現AFS 功能模式所要求的不同光型,并且系統更加節能和可靠。福特公司的一款汽車就采用了基于LED 的AFS。這種基于LED的AFS 通過傳感器采集環境信息并傳至中央控制單元,中央控制單元將數據處理后去控制各個角度LED 的亮度,從而使得駕駛員能夠更精確地掌握前方道路等周邊信息,有效提高了駕駛的安全系數。

圖8 用LED 作光源的AFS
2. 2 AFS 的控制方案及硬件組成
2. 2. 1 AFS 的控制方案
為了實現上述AFS 的各種照明模式,現提出如圖9 所示方案。此方案中,AFS 由4 大部分組成,分別為傳感器組、傳輸通路、處理單元和執行機構。此方案的基本思想是:中央處理器為實現汽車前照燈的自適應功能,需要首先通過傳感器組采集光線、車速、轉向、道路狀況等信息,再由傳輸通路實時傳輸這些信息至中央處理器,中央處理器經過復雜的控制邏輯和算法,將得到的控制命令發給執行單元,再由執行單元做出最終反應,從而達到預期效果。









評論