基于攝像頭和飛思卡爾16的智能小車尋跡系統設計

小車起點如圖5所示,特點是先由黑變亮,再由亮變黑。所以可根據這樣的特點進行起點識別。當采樣的灰度值由黑變亮再由亮變黑可判斷為起跑線。但是這樣判斷可能會把十字交叉路線或窄道的三角形標記誤判為起點。為了準確判斷需要進行3次以上具有起點特點時才可判斷。
本文引用地址:http://cqxgywz.com/article/246448.htm
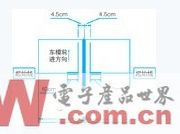
圖5 起點線
6 結束語
本系統采用基于coms攝像頭的路徑識別方法,通過攝像頭采集的道路信息送入單片機處理,通過算法提取出賽道黑線中心,識別彎道、窄道、坡道、起跑線等信息。通過大量試驗及參加大賽結果表明,本智能小車尋跡系統能夠準確識別道路情況,結果較為理想。該系統滿足實時、安全、溫定快速的要求,具有廣闊的應用前景,是當前智能車輛導引技術研究的主流方向和發展趨勢。
作者簡介
馮 震(1982-) 男 工學碩士/講師,網絡與智能控制方向。
參考文獻
[1] 邵貝貝.單片機嵌入式應用的在線開發方法[m]。北京:清華大學出版社,2007。
[2] 張海山,李偉.視頻采集與處理方法[j].河北理工學院學報,2007.2
[3] 賈秀江,李顥.攝像頭黑線識別算法和賽車行駛控制策略[j].電子產品世界,2007(5)
[4] 卓晴,黃開勝,邵貝貝等.學做智能車----挑戰“ 飛思卡爾”杯[m]。北京:北京航空航天出版社,2007。
色差儀相關文章:色差儀原理 攝像頭相關文章:攝像頭原理












評論