用于礦井環境監測的無線傳感器網絡

1.2 拓撲結構
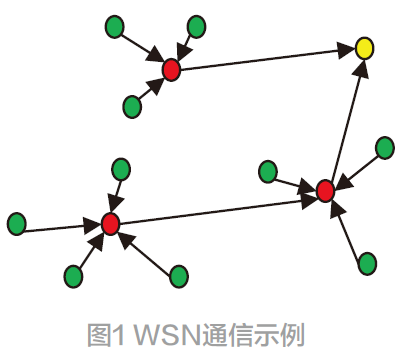
礦井環境監測最基本的要求是及時有效地傳遞信息,發布預警消息,保證井下安全。為此,無線傳感器網絡采用網狀拓撲結構。完全的網狀拓撲控制要消耗傳感器節點較多能量,為了在滿足網絡連通的前提下,盡可能地節約能量,在礦井的每個工作面部署的大量節點中選取少數節點作為骨干網節點,打開其通信模塊,關閉非骨干節點的通信模塊,由骨干節點建立一個網狀全連通網絡來負責數據的路由轉發。這樣既保證了原有覆蓋范圍內的數據通信,也在很大范圍內節約了能量。網絡拓撲結構如圖2所示。
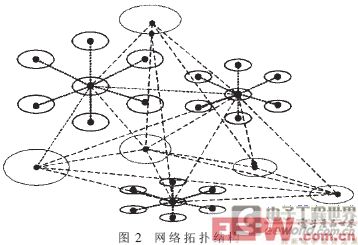
骨干節點需要調節非骨干節點的工作,負責數據的融合和轉發,能量消耗相對較大。通常由網絡自身周期性地監測各傳感器的能量狀態,并自動更換骨干節點來均衡網絡中各節點能量消耗。選取所有節點中能量大于某一設定值的少數幾個節點作為骨干節點,其余節點選取離自己距離最近的骨干節點作為自己的控制節點。如果礦井工作面距離較遠,或工作面數目多,可以在每個工作面專門部署一個能量較強的節點作為該工作面骨干節點的骨干節點,完成工作面之間的信息傳輸。
2 節點的軟硬件結構
2.1 硬件結構
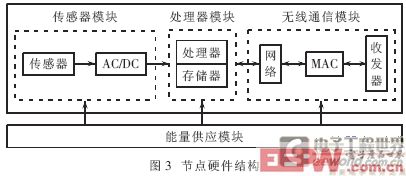
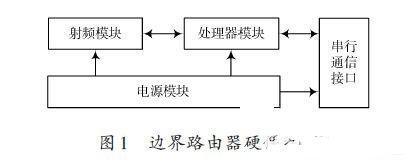
節點硬件結構如圖3所示[1],傳感器節點由傳感器模塊、處理器模塊、無線通信模塊和能量供應模塊四部分組成。傳感器模塊負責監測區域內信息的采集和數據轉換;處理器模塊負責控制整個傳感器節點,處理采集到的數據以及其他節點發來的數據;無線通信模塊負責與其他傳感器節點進行無線通信,交換控制信息和收發采集數據;能量供應模塊為傳感器節點提供運行所需的能量,采用微型電池。



評論