機器人:在一個月之內實現原型開發的四個平臺

目錄
1.使用LEGO MINDSTORMS NXT進行原型開發
2.使用iRobot Create進行原型開發
3.使用NI Single-Board RIO和NI CompactRIO進行原型開發
4.使用Mobile Robots Inc.進行原型開發
從工業自動化機器直至模仿人類行為的類人機器人,都要求使用當今最高級的控制系統和復雜機械結構。機器人 通常部署在動態環境中,這使得開發更具挑戰。即便是最先進的軟件仿真也無法仿真現實環境中的所有變量。要了解機器人在投入實際應用前如何響應不同的狀況, 功能原型是十分重要的。
將NI LabVIEW圖形化系統軟件與商用硬件整合在一起,您可以在一個月內開發軟件,并完成功能齊全的原型系統。您需要根據一系列因素進行開發平臺的選擇,其中包括價格、靈活性、I/O數量、處理器速度、堅固性和板載傳感器。一些用于原型開發的通用平臺使用了LEGO? MINDSTORMS? NXT、嵌入式NI CompactRIO和NI Single-Board RIO系統。表1提供了可用平臺的比較。
表1:針對不同應用和價位的機器人都有相應的原型開發平臺。

使用LEGO MINDSTORMS NXT進行原型開發
LEGO MINDSTORM NXT包含智能的、用于計算機控制的LEGO模塊,是預算較少的情況下進行原型開發的理想選擇。它包含32位ARM微控制器,可以用于和多種傳感器及電機 一起使用。通過使用用于LEGO MINDSTORMS NXT的LabVIEW工具包,您可以創建程序并直接下載到NXT模塊上。NXT模塊使用10位模擬數字轉換器(ADC)作為輸入,可以作為數據采集單 元,控制多達三個電機和轉數器。
新加坡義安理工學院的工程學院開發了視覺引導的自動化機器人,用于撿網球。通過使用相機采集圖像和NI機器視覺軟件完成目標跟蹤,機器以高精度和高速度完成了這個任務。在實際應用中,您需要更大的撿球系統完成整個網球場的任務,但是新加坡義安理工學院通過在NXT原型上測試其理論算法,從而降低了成本。
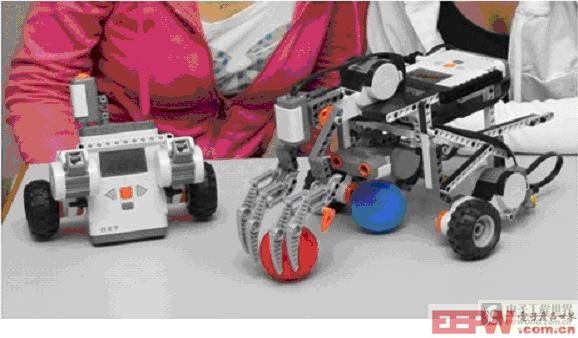
圖1:新加坡義安理工學院工程學院使用LabVIEW開發了視覺引導的自動化機器人用于撿網球。











評論