智能尋跡小車

軟件控制單元
單片機選型及程序流程
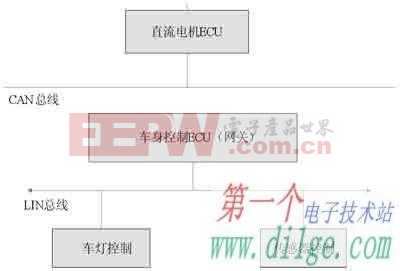
此部分是整個小車運行的核心部件,起著控制小車所有運行狀態的作用。控制方法有很多,大部分都采用單片機控制。由于51單片機具有價格低廉是使用簡單的特點,這里選擇了ATMEL公司的AT89S51作為控制核心部件,其程序控制方框圖如圖4所示。
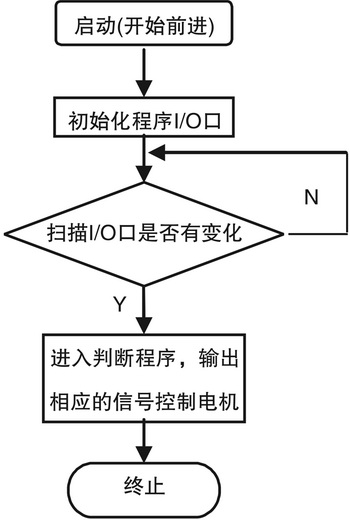
圖4 系統的程序流程圖
小車進入循跡模式后,即開始不停地掃描與探測器連接的單片機I/O口,一旦檢測到某個I/O口有信號變化,程序就進入判斷程序,把相應的信號發送給電動機從而糾正小車的狀態。
車速的控制
車速調節的方法有兩種:一是用步進電機代替小車上原有的直流電機;二是在原有直流電機的基礎上,采用PWM調速法進行調速。考慮到機械裝置不便于修改等因素,這里選擇后者,利用單片機輸出端輸出高電平的脈寬及其占空比的大小來控制電機的轉速,從而控制小車的速度。經過多次試驗,最終確定合適的脈寬和占空比,基本能保證小車在所需要的速度范圍內平穩前行。
電機驅動單元
從單片機輸出的信號功率很弱,即使在沒有其它外在負載時也無法帶動電機,所以在實際電路中我們加入了電機驅動芯片提高輸入電機信號的功率,從而能夠根據需要控制電機轉動。根據驅動功率大小以及連接電路的簡化要求選擇L298N,其外形、管腳分布如圖5所示。
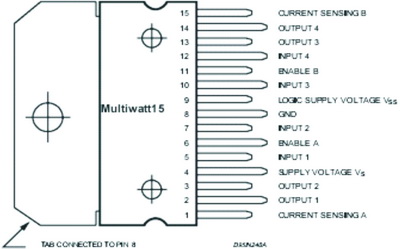
圖5 L298N管腳分布圖
從圖中可以知道,一塊L298N芯片能夠驅動兩個電機轉動,它的使能端可以外接高低電平,也可以利用單片機進行軟件控制,極大地滿足各種復雜電路需要。另外,L298N的驅動功率較大,能夠根據輸入電壓的大小輸出不同的電壓和功率,解決了負載能力不夠這個問題。
結語
此方案選擇的器件比較簡單,實際中也很容易實現。經過多次測試,結果表明在一定的弧度范圍內,小車能夠沿著黑線軌跡行進,達到了預期目標。不足之處,由于小車采用直流電機,其速度控制不夠精確和穩定,不能實現急轉和大弧度的拐彎。
參考文獻:
1. 趙家貴、付小美、董平,新編傳感器電路設計手冊,中國計量出版社,2002
2. 李華等,MCS-51系列單片機實用接口技術,北京航空航天大學出版社,2003
3. 王曉明,電動機的單片機控制,北京航空航天大學出版社,2002









評論